基于ARM9在高精度生化分析仪温度控制系统中的应用

3 模糊自整定PID控制算法模块设计
模糊自整定PID控制系统能在控制过程中对不确定的条件、参数、延迟和干扰等因素进行检测分析,采用模糊推理的方法实现PID三个参数 、 f和 的在线自整定。模糊自整定PID控制不仅保持了常规PID控制系统的原理简单、使用方便、鲁棒性较强等特点,而且具有更大的灵活性、适应性、精确性等特性。
模糊自整定PID控制器是在常规PID控制器的基础上建立参数K ,K ,K 与偏差绝对值IE I和偏差变化率 取输入偏差、偏差变化率和输出隶属度函数分别如图3所示。
绝对值lecI问的二元连续函数关系的控制器。二元函数关系为 ]: = ( ,J j), = 0 ,J ),K = ( JEc})。模糊自整定PID控制器根据不同的 、IEcI在线自整定K, K 和Kd。

对于图3中 的隶属度,当n=p时,a,b分别取一0.3,0.3;当n=i时,a,b分别取一0.06,0.06;当n=d时,a,b分别取一3,3。
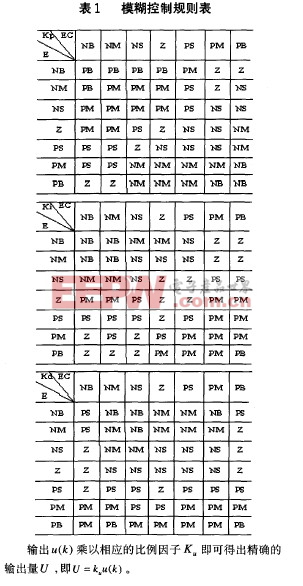
模糊一PID控制系统为双输人三输出系统,输入量为偏差E和偏差变化率EC,输出量为PID参数 ,K 和 。采用七种不同的模糊语言变量进行描述:负小(NS)、负中(NM)、负3v(NB)、零(Z)、正小(Ps)、正中(PM)、正大(PB),控制规则取为:if E and EC then K ,K, ,根据PID控制的基本原理,结合实际经验,设计模糊控制表如表1所示。

pid控制器相关文章:pid控制器原理













评论