基于DSP控制的数字式双向DC/DC变换器的实现

(d)vab波形
图3 原边对副边放电S1~S4驱动信号与vab
移相控制时门极脉冲如图3(c)所示,S4门极脉冲比S1门极脉冲滞后一个角度θ,vab如图3(d)所示。因此,可以通过控制滞后角度θ的大小来控制输出电压。在数字控制器中可以用软件设定滞后角度θ来控制输出电压,即可以通过移相控制使输出电压可调。
1.2 副边对原边充电
此时,如图3所示,只要把S5~S8的驱动信号与S1~S4的驱动信号互换,vab则由vcd替换即可,同样存在满调制和移相控制两种情况。但是,通常情况下充电要求恒流充电,因此,也可以通过移相控制来满足此要求。原副边的工作过程刚好与放电时相反。此处不再赘述。
2 双向DC/DC数字化控制的软件实现
双向DC/DC变换器,可以实现能量的双向传输。通常正向放电要求输出电压可调,而反向充电过程通常要求充电电流恒定不变。通过对S3和S2的移相控制可以实现副边输出电压的可调要求,同样,副边对原边进行充电时,可以通过移相控制使得充电电流恒定。
主程序流程图和ADC的中断服务程序流程图分别如图4和图5所示,在软件进行移相控制实现输出电压可调的同时,软件实现电压环的调节,使输出稳压。由于TMS320LF2407内部带有ADC模块,因此,输出电压值通过电压LEM采样反馈给DSP的ADC模块,在AD中断程序里读取采样值,然后进行数字滤波和数字PI调节,使输出稳压。
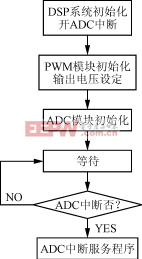
图4 主程序流程图
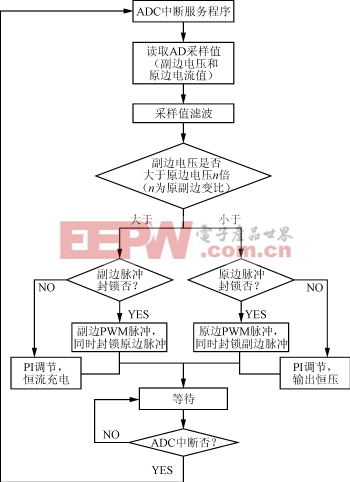
图5 ADC中断服务程序流程图
一般充电要求是恒流充电,所以,充电时反馈用电流环,对原边的充电电流进行PI调节,实现恒流充电。本实验中原边供电电源为蓄电池,由于其电压为12V,真正要实现电流反向,使原边的二极管导通,考虑到变压器原副边的变比为1:2,副边电压必须超过24V时才能实现电流反向,故必须得对副边电压采样。对副边电压的采样,不仅实现了PI调节,同时也用来控制双向工作方式的切换。在双向DC/DC的负载端电压上升到一定程度时可以使能量倒流,对原边进行充电,使副边多余的能量能够反馈给原边。
电压采样和电流采样是实现输出电压可调及稳压和充电电流恒定的关键,在DSP的中断服务程序中对采样值进行数字滤波和PI调节。程序根据给定输出电压参考值和充电电流参考值进行PI调节,当原边输入电压变动时,副边输出电压稳定在给定值;而当副边负载电压有波动时也可以根据给定电流参考来调节相移大小,控制原边充电电流值。数字式PI调节采用的是增量式PI控制,其系统框图如图6所示。由于DSP具有强大的计算能力以及EV(Event Manager)模块,则PWM信号可以方便地得到,因此,硬件部分可以大大简化,控制电路部分可以全部省略而由软件来代替,即软件实现PI计算控制以及PWM信号的产生。但是,考虑到DSP的安全性问题,必须有光耦隔离。
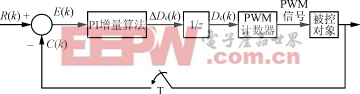
图6 增量式PI控制系统框图
3 实验结果
根据上述主电路工作原理分析,为证实数字化控制方法的有效性,制作了一台实验样机,开关频率为50kHz。对于图2所示的主电路结构,所选用元器件参数如下:S1~S8选用IRF840,Vin为蓄电池(12V,4A·h/20h,充电使用);C1为100μF,C2为100μF;IRF840前级用TLP250驱动,控制器用TMS320LF2407A,光耦采用6N137;电压采样LEM为电流型的LV25-P,原边额定电流10mA,副边对应电流25mA,此输入和输出对应精度为±0.9%;电流采样LEM为HDC-040G系列霍尔电流传感器,其输出电压2.5V±1V,精度为±1%。
图7(a)所示为副边输出10V时的实验波形,当输入电压分别为10V,40V,50V时,S2和S4的驱动波形分别如图7(b),(c), (d)所示,可见当输出电压给定时,而输入电压可变,可以通过前文所提到的增量式数字PI控制实现移相控制,使输出稳压得以实现。图8为副边输出20V时的输出电压波形和各主开关的驱动波形。
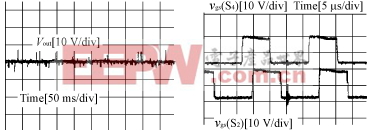
(a) 10V输出波形 (b) 10V输入时的驱动波形
脉宽调制相关文章:脉宽调制原理 数字滤波器相关文章:数字滤波器原理






评论