基于DSP的覆冰机器人控制系统研究

定义第一个节点的死亡时间为无线传感器网络的网络寿命,用工作轮数表示网络的工作时间。如果剩余节点过少,那么整个网络的存在就毫无意义。仿真中为了更好地对比仿真结果,仿真曲线只选取剩余节点数大于50的情况。仿真结果如图5所示。
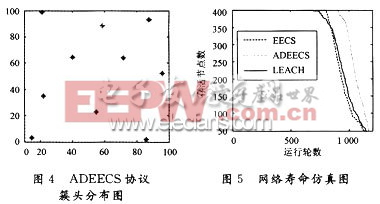
由图5可以看出,在成簇阶段,ADEECS协议综合考虑了簇头剩余能量、簇头与基站的距离以及簇成员节点与簇头的距离。这种通信代价计算方式很好地提高了网络性能,有效地延长了网络生命周期,达到了协议目的。
5结语
通过对无线传感器网络中典型分簇路由协议、LEACH协议和EECS协议进行的研究和分析,提出了一种改进的分簇方案ADEECS。利用延迟发送竞争消息的方法和新的通信代价公式很好地解决了EECS协议存在的问题,实现了簇头的均匀分布,有效地延长了网络寿命。











评论