DSP在无刷直流电机控制中的应用简介

本文引用地址:https://www.eepw.com.cn/article/148305.htm
从理论上来看,直流无刷电动机的速度和转矩控制主要依据如下的转矩和反电动势工程计算方程
其中,N为直流无刷电动机定子每相线圈数, 为转子的长度,r为转子的内径,B为转子的磁通密度, 为电动机的角速度,i为相电流,L为相感抗, 为转子的位置,R为相阻抗。
从方程可以看到,反电动势与电动机的转速成比例,而转矩与相电流也几乎势成比例的。根据这些特点,在方案中采用了图3所示的控制策略。给定转速与速度反馈形成偏差,经速度调节后产生电流参考量,它与电流反馈量的偏差经电流调节后形成PWM占空比的控制量,实现电动机的速度控制。电流的反馈是通过检测电阻上的压降来实现的。速度反馈是通过霍尔传感器输出的位置量,经过计算得到的。位置传感器输出的位置量还用于控制换相。
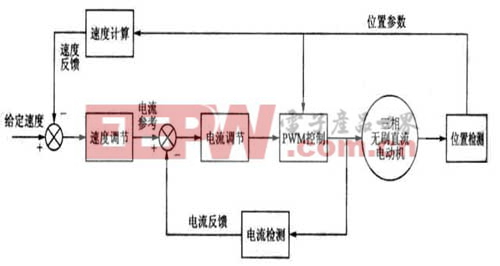
图3 三相无刷直流电动机的速度和电流控制
4 软件控制
系统采用PWM控制算法,电机输入直流电流且每一时刻只有两个功率管导通,从2407来的PWM控制信号直接连至驱动器,驱动器的输出再连至功率MOSFET管的控制极。2407的CPU时钟频率是20MHz,PWM频率是20kHz。











评论