基于DSP的嵌入式通用主动视觉系统

4 系统软件设计
4.1 C6711软件实现
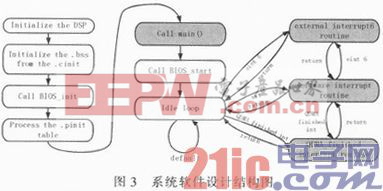
C6711软件设计过程中充分地考虑流水线处理的特点,充分发挥流水线的功能实现多种任务并行执行是设计的关键。因为系统采用帧缓冲存储结构只能完整地保存一行图像数据,所以当一行结束时必须及时将数据从帧缓冲存储中读出来。设计中采用C6711的QDMA功能实现图像数据的读取,减少C6711计算资源的占用并实现C6711运算资源的最大利用。软件流程如图3所示。本文引用地址:https://www.eepw.com.cn/article/148023.htm
4.2 F2812电机控制实现
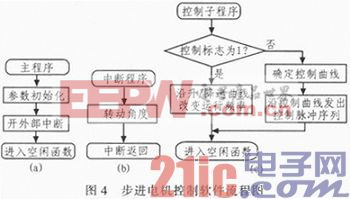
主动视觉系统对平台运动速度提出比较高的要求。步进电机在高速转动控制中容易出现失步的问题。电机失步会引起角度控制的误差,在控制中必须加以避免。避免步进电机失步是电机控制软件设计中的关键。为避免步进电机在加速和减速时出现失步,在加速和减速时采用升速/降速曲线进行控制,其控制软件流程如图4所示。
5 实验应用
5.1 图像采集实验
图像采集是系统中非常重要的一环,图像采集质量的好坏直接影响到目标检测的成败。实验中通过编写专门的图像采集程序,将采集到的图像存放在C6711DSK的SDRAM中,然后通过CCS2.0的图像调试工具读取图像,并在CCS调试界面中显示出来,从而验证图像采集质量的好坏。图像采集的实验结果如图5所示,实验结果说明图像清晰完整且颜色正常。

5.2 目标跟踪实验
在实验室真实环境下采用桔红色的排球作为跟踪目标,在距离系统正前方1.5米左右处以不同方式运动。跟踪控制采用比例控制实现,通过对静止、水平往复运动、垂直往复运动、圆周运动目标的跟踪性能的分析验证系统的性能。图6显示了系统对水平往复运动目标进行跟踪的结果。
6 结论
文中将TMS320C6711的运算能力和TMS320F2812的控制能力和丰富的外围接口相结合实现了高性能主动视觉系统。图像采集由专用视频解码芯片完成,通过FIFO实现视频解码器与C6711的互联,通过DMA方式读取FIFO中的数据。这样的设计充分发挥了C6711流水处理的特点,提高计算资源的利用率。采用F2812提供的接口实现了传感器数据采集和PC机之间的通讯,弥补了C6711在运动控制和接口资源方面的不足。实验结果表明设计可行,系统性能达到设计要求。



评论