为你的输入找到最合适的匹配

Dave:因此,反馈回路实际上“纠正”了由10k(并联的R1和R2……固定电阻)、反馈C1(固定电容)和输入C(可变电容)组成的不同的时间常数,见图2。但是正输入端不会受到影响。如果反馈网络出现相位滞后(phase lag),放大器将由输出端出现的相位超前(phase lead)来响应。
T博士:这是由于反馈方程改变了反馈网络的结果。
Dave:是的,我将给我们有兴趣的读者留下一些思考。但是,反馈中一个低通会在输出端产生高通,反馈中的高通会在输出端产生低通。有趣的是,反馈中的延迟要比输出中的提前……因此,我可以预测,明天的市场上将会有足够多的延迟线和运算放大器!
T博士:我觉得你这里的逻辑有一些问题……
Dave:当然。如果你把这个概念推到极端,全部事情都会变得不稳定……所以,我不会很快致富。但是,在小范围内,效果十分有效。反馈中的一个小相位延迟会使输出出现一个小相位超前。
T博士:但是,你真正想要的是在两个输入端有相同的效果。
Dave:我需要在输入端增加电阻,这样其RC乘积就可以匹配反馈RC乘积。
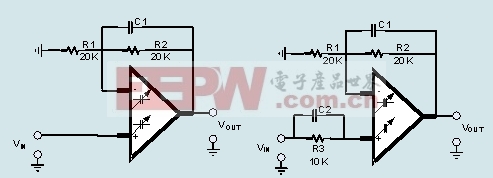
图2:不同输入C的补偿
T博士:这听起来几乎就像双极运算放大器中的平衡DC电流。你需要使两个输入端的等效电阻相同,以尽量减少偏移。
Dave:就是这样!如果平衡了正输入端和负输入端的RC延迟,那么,当C随着信号变化时,两个RC将变化,并有效地相互抵消。所以,我在信号到正输入端之间串联了一个R(像在反馈R中那样用一个C跨接)。现在我在两个输入端得到了同样的结果,就如同在DC的情况下,它们都会抵消。我的失真几乎消失了!问题解决了。
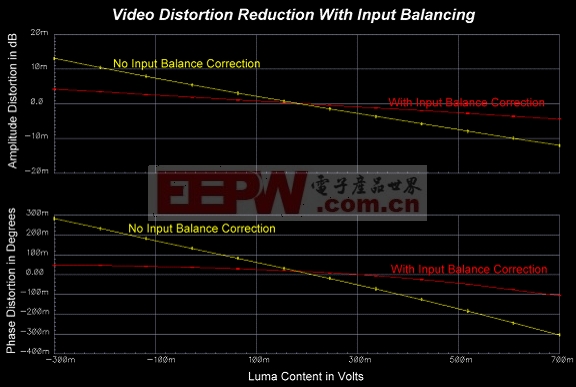
图3:利用平衡输入阻抗减少视频失真(图字:以度表示的相位失真;以dB表示的振幅失真)





评论