激光制导自动跟踪焊接系统
—— 确保焊接施工的精确、高效和安全

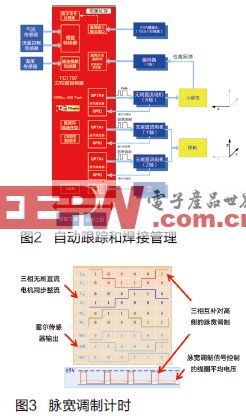
采用大津方法处理图像
本文引用地址:https://www.eepw.com.cn/article/113802.htm采用大津阈值法来处理所采集的图像,以自动计算出在变化不定的照明条件下的最优阈值。利用大津方法,我们尽一切可能找到能最大限度地降低类内方差值(即,两个类的方差的加权总和)的阈值:
权数ωi是被阈值t分隔开的两个类的概率,2iσ是这两个类的方差。
大津法表明,最大限度地降低类内方差值,等同于最大限度地提高类间方差值:
其中,ωi是类概率,μi是类平均数,相应地,这个值可以迭代更新。这种方法产生了一个简单而又有效的算法:
1. 计算各个亮度条件下的直方图和概率。
2. 设置初始ωi(0)和μi(0)。
3. 逐一计算所有可能的阈值t = 1 ⋯ 最高亮度:更新ωi和μi;计算 。
4. 对应于最大 的理想阈值。
采用上述算法,处理所保存的图像。经处理的图像将保存到另一个10kb阵列中。确定最优阈值后,计算出中线(单像素宽线)。下一步是从中线中找到结合点。由此得到的坐标值将被输出至先入先出堆栈。处理每帧图像的平均用时约为65ms。
先入先出缓冲区
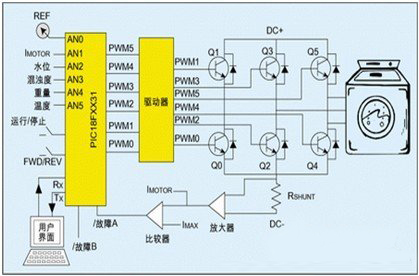
利用先入先出循环缓冲区来保存图像处理模块计算得到的坐标值。然后,伺服电机模块将利用这些坐标值来将焊枪移动至相应的位置。摄像头的初始坐标值是0,而焊枪的初始坐标值则是CIRCULAR_BUF_SIZE-1。根据摄像头与焊枪之间的步数,在汇编时决定先入先出缓冲区的大小。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 脉宽调制相关文章:脉宽调制原理 摄像头相关文章:摄像头原理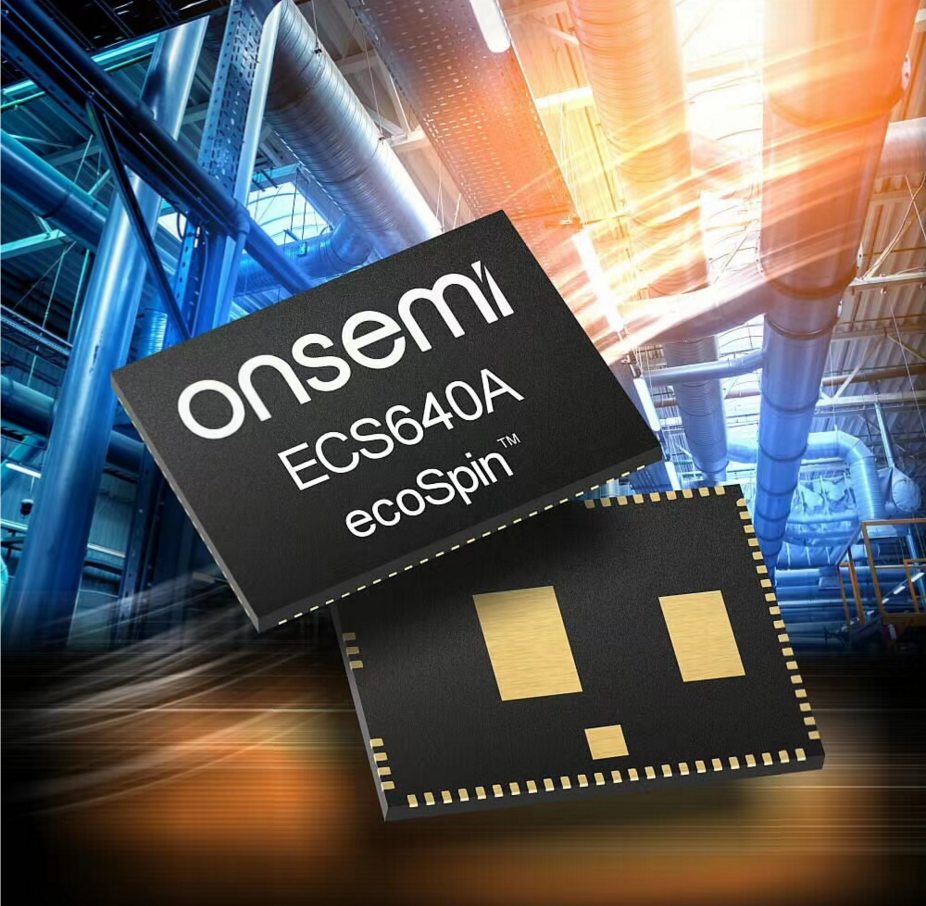





评论