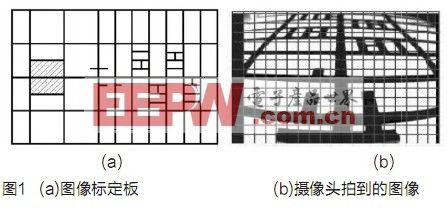
- 在智能车比赛中,摄像头组肯定要遇到的问题是图像存在梯形失真,若选用广角镜头,还会存在桶形失真。解决这两种几何失真将对后面的处理提供方便。本文介绍了作者所在车队的摄像头标定技术。此方法简单实用,值得借鉴。
- 关键字:
飞思卡尔 智能车 梯形失真 桶形失真 广角镜头 201007
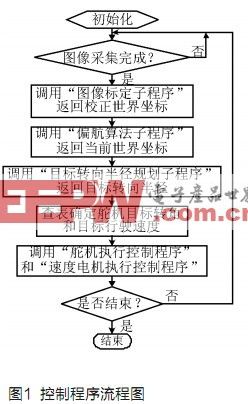
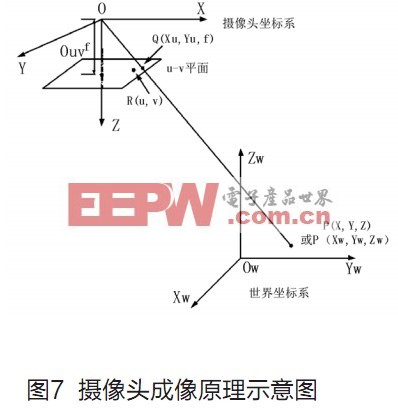
- 提出一种确保智能车高速稳定行驶的局部路径规划算法。利用CCD传感器采集道路图像信息,综合考虑智能车相对道路的位置和姿态,弯道类型等,完成CCD传感器图像标定、偏航计算和路径规划,进而试验标定目标转向半径与避免侧滑的最高车速的关系以及目标转向半径与转向角的关系,最终查表输出确保智能车高速稳定行驶的车速与转向角。试验结果表明:本算法能确保智能车以较高车速稳定行驶通过规定路径。
- 关键字:
智能车 传感器 局部路径规划 高速 稳定 201005
- 引言
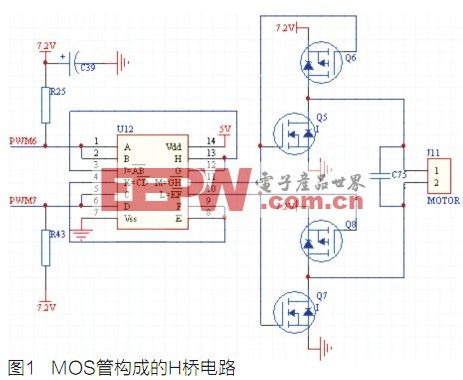
在智能车竞赛中,速度控制不能采用单纯的PID,而要采用能够在全加速、紧急制动和闭环控制等多种模式中平稳切换的“多模式”速度控制算法,才能根据不同的道路状况迅速准确地改变车速,实现稳定过弯。
系统硬件设计
按照竞赛要求,本文设计的智能车速度控制系统,以飞思卡尔MC9S12DG128 单片机为核心,与车速检测模块、直流电机驱动模块、电源模块等一起构成了智能车速度闭环控制系统。单片机根据赛道信息采用合理的控制算法实现对车速的控制,车速检测采用安装于车模后轴上的
- 关键字:
智能车 速度控制 PWM

- 摘要:在智能车系统的设计中,路径识别的准确性直接影响到智能车能否正确地行驶。以摄像头作为路径识别的传感器能够有效地提高智能车的前瞻性,但原始图像的数据量相对单片机来说是比较庞大的。本文采用了硬件分频的方法对图像数据进行了有效的压缩,并对图像对进行二值化和去除噪声的预处理。大量的实验结果表明,该方案能够实现路径识别的正确性与快速性。
- 关键字:
飞思卡尔 智能车 图像采集 图像处理

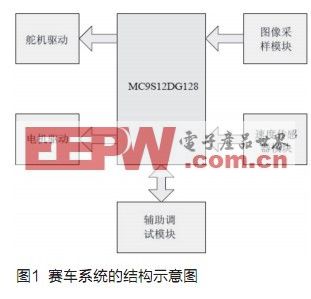
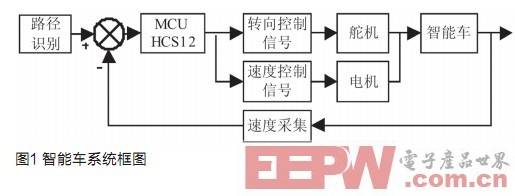
- 本设计是以第三届全国大学生“飞思卡尔”杯智能汽车竞赛为背景,使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的两片8位微控制器MC9S08DZ60作为核心控制单元,自主构思控制方案进行系统设计。系统基本构建如图1所示,包括传感器信号采集处理、动力电机驱动、转向舵机控制以及控制算法软件开发等。
- 关键字:
飞思卡尔 智能车 双核

- 近日,2010年第五届飞思卡尔杯全国大学生智能车大赛华北区培训活动在清华大学举行,来自华北地区参赛高校的数百名教师和学生代表参加了新一届大赛的培训工作。
从2006年开始,飞思卡尔杯全国大学生智能车大赛已经成功举办了四届,每届参赛学生总数已经达到千人以上。
新增电磁组竞赛单元
“与往届不同,今年的第五届智能车竞赛新增了电磁组的竞赛单元,参赛者需要用电磁器件代替传统的光电和CCD,通过磁感应来进行赛道信息的获取渠道,以此控制智能车在赛道上行驶。”竞赛秘书处主任兼
- 关键字:
飞思卡尔 智能车 CCD 光电 201004
- 静静地看着精巧的车模在赛道上灵巧地行驶,耳畔是观众随着场上比赛情况时而喝彩时而惋惜,时光轮回,在朦胧中仿佛回到自己一去不复返的青春岁月。
作为面向本科生参加的飞思卡尔智能车大赛,每个人基本上只有一次参与其中的机会。笔者在第三届智能车大赛的现场见到了两年前曾经相遇的一些首届大赛的参赛者,他们这次是作为指导教师或者助理的身份再次回到这个熟悉的赛场。
而无论是参赛学生,还是指导教师,他们都对参赛有着自己的感想,每个人的理解又是不同的。在这里,选择部分参赛者的参赛感言记录,希望大家共鸣。
测
- 关键字:
飞思卡尔 智能车 选手
- 本文主要对车模整体设计思路、硬件与软件设计及车模的装配调试过程作简要的说明。智能车通过实时对自身运动速度及方向等进行调整来“沿”赛道运动。运动策略的制定主要是依靠对传感器得到的道路及行驶信息进行采集、分析、决策、执行四个步骤来进行的。
- 关键字:
飞思卡尔 智能车 摄像头 CCD 图像处理 201003
- 本文以Freescale 16位单片机MC9S12DG128为核心控制器,在CodeWarrior IDE开发环境中进行软件开发,要求赛车在未知道路上沿着黑线以最快的速度完成比赛。整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。为了提高智能赛车的行驶速度和可靠性,对比了不同方案的优缺点,并结合LabVIEW仿真平台进行了大量底层和上层测试,最终确定了现有的系统结构和各项控制参数。
- 关键字:
Freescale 智能车 摄像头 PID 201001

- 本文研究了载流导线磁场中寻线小车位置检测的分析方法,给出了小车位置解算和道路形式推断的原理和算法,讨论了该寻线小车传感器布局的一般原则并给出了一种布局方案。
- 关键字:
飞思卡尔 智能车 传感器 磁场 寻线 布局 200912
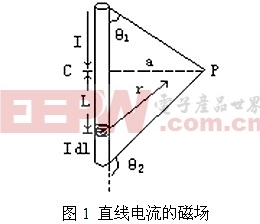
- 本设计以“飞思卡尔”杯全国大学生智能车竞赛为背景,提出了一种根据电磁场信号引导小车循迹行驶的方案。本文介绍了这一方案的基本思想,所依据的物理原理,给出了对电感线圈得到的信号进行调理放大和控制小车舵机运行的电路,并根据方案实际制作了小车。实践证明该方案是可行的。
- 关键字:
飞思卡尔 智能车 磁场 线圈 磁感应强度 感应电动势 200911
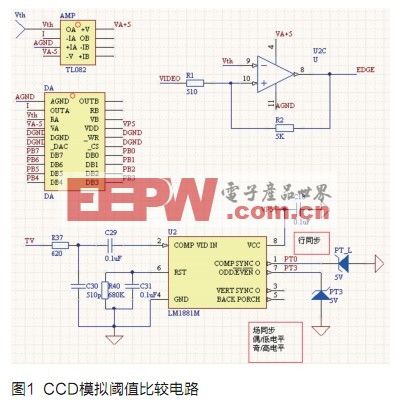
- 在智能车系统的设计中,路径识别的准确性直接影响到智能车能否正确地行驶。以摄像头作为路径识别的传感器能够有效地提高智能车的前瞻性,但原始图像的数据量相对单片机来说是比较庞大的。本文采用了硬件分频的方法对图像数据进行了有效的压缩,并对图像对进行二值化和去除噪声的预处理。大量的实验结果表明,该方案能够实现路径识别的正确性与快速性。
- 关键字:
飞思卡尔 智能车 图像采集 图像二值化 SAA7111 200910

- 车模的图像是车模稳定性的关键,机械部分是速度的关键,优良的辅助调试系统是高效率调试的前提,而其它的控制、驱动、决策等部分在以上部分良好的前提下,则显得相对次要。本次车模的制作目标应着重提升机械性能,并提高图像质量。
- 关键字:
飞思卡尔 智能车 摄像头 偏振镜 图像采集 FTTx 200909
智能车介绍
智能车
(Intelligent Car)是电子计算机等最新科技成果与现代汽车工业相结合的产物,因而“善解人意”。通常具有自动驾驶,自动变速,甚至具有自动识别道路的功能。另外,车内的各种辅助设施也一应电脑化,常常给人以新奇感。
Freescale做的智能车大赛比较有名。
[
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473