车载雷达机电式自动调平系统的方案
本车载雷达平台调平过程具体分两个阶段完成。第一阶段为架设阶段,即车载雷达到达阵地后,先控制四个支撑腿着地,进行落地检测。系统通电后,操作人员只需按操作面板上的“架设”键,控制系统驱动伺服电机升支撑腿,同时检测各支撑腿是否着地,当某一支撑腿着地后停止该腿的升动作。当四个支撑腿全部着地后,落地检测结束。第二阶段为调平阶段。操作人员按操作面板上的“调平”键,单片机读取水平传感器送来当前车载平台的倾斜度数据以及压力传感器送来的各支撑腿的受力数据,根据倾角数据和压力数据,按照控制策略驱动相应电机上升相应支撑腿,直至座车倾斜度达到雷达系统的要求。
本文引用地址:http://www.eepw.com.cn/article/99726.htm系统程序工作流程
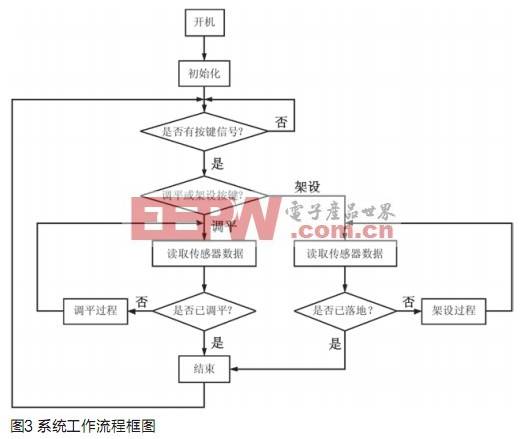
本系统的工作流程框图如图3所示。

伺服电机相关文章:伺服电机工作原理










评论