车载雷达机电式自动调平系统的方案
4点及多点调平设计面临的一个主要问题是虚腿现象,即有一个腿受力很小或者悬空,这在调平过程中是不能允许的。当平台的负载均匀时,4个支撑点的受力应该均匀。本系统设计的处理办法是把平台支撑起来后,先进行一次粗调平(设定一个粗精度),目的是使4个支撑点的受力比较接近。然后,再按照系统设定的调平精度进行调平。这样,调节的过程就中不会出现一腿受力过小(虚腿),从而有效的预防虚腿现象的出现。
本文引用地址:http://www.eepw.com.cn/article/99726.htm硬件组成
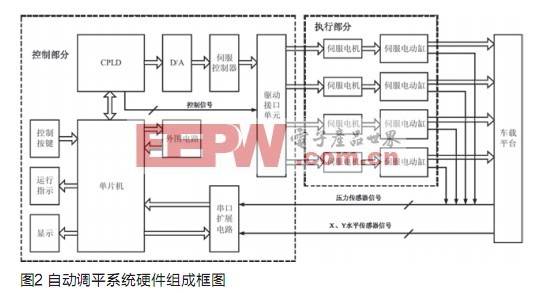
该自动调平系统硬件组成如图2所示。系统主要由控制部分、水平传感器、压力传感器、伺服控制器、伺服电机及伺服电动缸等组成。
水平传感器(X、Y两个方向)测量车载平台的倾斜度,通过RS232串行口向控制部分发送X方向和Y方向的倾角数据,波特率采用9600bit/s。本系统采用的水平传感器其测量精度(零位)为0±20",分辨率≤4",完全满足平台倾角测量和调平的要求。
压力传感器用于测量4个支撑脚承受的压力,测量范围0~9000kg,通过RS232串行口向控制部分发送压力数据,波特率采用9600bit/s。
控制部分主要由控制板、伺服驱动器和驱动接口单元组成。控制板是控制部分的核心,主要由单片机、CPLD、多路DAC、多串口扩展电路、RS232电平转换电路、看门狗电路等组成。当操作人员通过按键将控制指令发送到控制板,CPU读取水平传感器、压力传感器送来的数据进行判断并形成控制策略,产生控制信号由DAC送达伺服控制器,再控制驱动接口电路驱动某一路伺服电机运转,直至调平。为了操作安全起见,整个调平运行过程通过声、光进行指示。控制部分实时地将倾角、压力数据进行显示,方便操作人员监控。

伺服电机相关文章:伺服电机工作原理










评论