基于LabVIEW构建智能的移动机器人及无人驾驶车
—— Leveraging LabVIEW Platform to Build Intelligent Mobile Robots and Unmanned Vehicles

引言
本文引用地址:https://www.eepw.com.cn/article/98860.htm移动机器人构成复杂、应用灵活,目前商业化程度还不高,相对处于前沿研究的阶段,因此一直以来都是科学家和工程师们关注的重点。 移动机器人具有某些共同的构架和组成部分,是一个融合了众多机电系统和子系统的综合体系,并通过这些组成部分与子系统的有机结合协调工作,虽然部分子系统已有现成的软硬件工具和解决方案,但如何快速地把各子系统集成在一起、进行早期的整体功能性验证,就成了决定机器人设计成败的关键性环节。
图形化系统设计—机器人设计的前沿方法
在Google X PRIZE机构、FIRST组织(科学技术的启示与认知组织)、RoboCup以及美国国防高级研究计划局(DARPA)之间展开的竞争推进了机器人学领域的创新。富有创新思维的开发者们将机器人学的前沿方法推进到了图形化系统设计。在LabVIEW图形化编程平台下,机器人学的领域专家能够对复杂的机器人方案进行快速的原型设计。这些创新工作者能够不用关心底层的实现细节,可以将注意力集中到解决手上的工程问题中去。
机器人设计通常包含以下部分的工作内容,如图1所示。
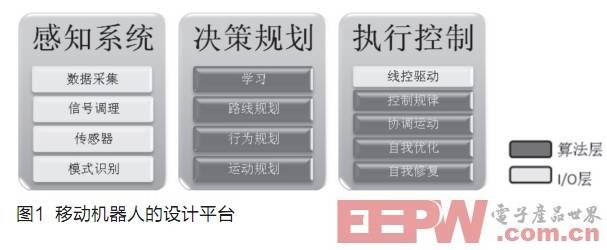
感知系统——连接到陀螺仪、CCD、光电、超声等传感器,获取并处理信息。
决策规划——相当于机器人的‘大脑’,根据算法进行控制决策,完成管理协调、信息处理、运动规划等任务。
执行控制——根据具体的作业指令,通过驱动控制器、编码器和电机完成机器人的伺服控制与运动执行。
网络通讯与控制——机器人各子系统间的通讯网络,完成分布式控制与实时控制。











评论