基于中值的图像椒盐噪声的非迭代滤除

1 引 言
滤去图像中的噪声同时保持其中的细节是图像处理中的一个重要内容。现实中由于照相机的性能和光线强弱的变化,噪声在图像中不可避免。去除噪声的方法大致分为两类:线性方法和非线性方法。线性滤波和含噪图像的卷积能有效地去除高斯噪声以及其他呈均匀分布的噪声,但由于这种方法把边界处灰度变化较大位置的点也当作椒盐噪声处理,因此他对这样的噪声效果甚微,并且还经常对图像造成模糊。为了克服这些问题,采用非线性滤波,中值滤波进行处理是最常用的一种方法。当考虑一个小邻域时,椒盐噪声能得到高效的抑制。然而中值滤波的最大缺点是他作用于整幅图像,因此损失其中的大部分细节。为此找一种既能有效去除噪声又能保持细节的方法是许多人感兴趣的问题。
为了解决这个问题,大家已研究了不少基于中值滤波的改进方法如:权衡中值滤波,最大最小值的方法,中心权衡的中值滤波,强有力的最大最小值的方法,自适应的消减均值滤波,正则化的方法等。为了防止改变非噪声点的值,这些方法都涉及噪声点的识别问题。基于最大最小值的波峰波谷方法是一种非迭代的快速算法,但他对噪声点的毁坏程度(即恢复后的图像与原图像相比灰度值不同点的百分数)比较高,造成了细节的不小损失。去除脉冲噪声的高效方法对噪声的探索比较有效,但对噪声的滤除却使用了简单的标准中值方法,使得最终的实验结果不是很好。本文综合两者的优点,提出了一种既能去除噪声又能比较好的保持细节的有效方法。他分两步达到去噪目的:第一步在文献[7]的基础上同时考虑了与中心点灰度最接近的几个象素点的均值与一个客观的阈值做比较,来更加有效地识别噪声点;第二步采用了文献[7]中的最大最小值的方法。
2 中值滤波
中值滤波是基于统计学的一种最常用的非线性滤波方法。我们考虑5×5模板,如图1所示。
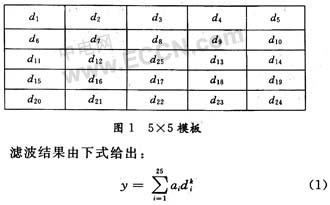
这里的dki是25个输入统计量,常数ai可以根据具体问题进行选择。中值滤波是当式(1)的系数狳了a13以外的ai均取零时的一种特殊情况。当噪声点数量少手窗中抽样的一半时,中值滤波是非常有效的。
3 基于最大最小值的波峰波谷滤波
基于最大最小值的波峰波谷滤波是一种基于排序来消除图像噪声的非线性非l迭代的滤波方法。他分两步完成,具体算法如下:
值得注意的是按这种方法的第一步探索的点不一定是噪声点,因为在分析的窗中如果没有噪声点,最大或最小值点仍被视为噪声点,比如窄的边缘,细线及部分平坦灰度区域,他们的灰度值也有可能等于窗内的极值。因此这种滤波方法可能对边缘造成平滑,把细线当作噪声除掉,还有可能对平坦区域的细节造成模糊,如图2所示。

图2(a)为不含噪声的原图像;图2(b)为噪声密度5%的污染图像;图2(c)为基于最大最小值的波峰波谷滤波方法结果;图2(d)为建议的方法得到的结果。
下面为了叙述问题的方便,先引入一个概念:均值MTP。我们把中心点x(i,j)与其方形邻域的灰度差记NLD(这里考虑的是5×5的模板),然后对他们进行排序RLD,取其最小的13个元素的均值即为所述的均值MTP。

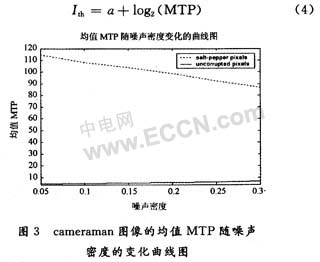
为了克服上面算法的不足,我们考虑了中心象素与其邻域象素的相似性。这是因为图像中未污染点周围一般都存在一定数量灰度值与其相近的点,也就是说这些点与其邻域像素的相关性比较大,而椒盐噪声点周围很少存在这样的点。如图3给出的cameraman图像的均值MTP随噪声密度变化的曲线图。上面的虚线为椒盐噪声点的均值随着噪声密度的增加而变化的情况;下面的实线为不受噪声污染的点随噪声密度的增加而变化的情况。从图中明显看到污染点的均值T1明显大于未受污染点的均值T2,且T2随着噪声的增加变化很小,接近于常数。因此利用未受污染像素点与其邻域像素相关性较大这一特性就能较好的把图像中窄的边缘,细线及部分细节与噪声区分开来,在去除噪声的同时有效地保护细节和边缘。
如何进一步探索噪声点,具体来说就是:将MTP与一个客观的阈值Ith做比较。如果被考虑的中心象素所对应的均值MTP≥Ith,就说明该点与其邻域像素的相关性比较小,他可能为噪声点;否则该点就被视为非噪声点。
为了使本方法具有普遍性,可以使用于多样的图像和噪声分布,减少人为的选择,实验采用了多个标准图像进行处理。根据多次试验采集的数据,在不同噪声密度下(5%,10%,15%,20%,30%),参数a的选取以滤波效果峰值信噪比PSNR和噪声对图像的毁坏程度为标准而得到。多个实验结果表明,其分布曲线相似。下面以cam-eraman图像为例给出了峰值信噪比和噪声对图像的毁坏程度随a变化的曲线(图4),从图4中可以看到在不同的噪声密度下峰值信噪比当a的范围在25~50之间时,随a的不同取值变化不是很大。毁坏程度当a>5时,几乎没什么变化。综合这两方面的因素,在不同的情况下,a一般在25~50之间就能达到较好的效果。这说明此方法有比较强的实用性。
因此我们建议的算法如下:
这种方法对于所含噪声比较低(少于20%)的图像非常有效,此时误探点如果非常多,就会造成细节的很大损失与边缘的光滑。而这时考虑了中心象素与其邻域象素的相似性就能方便地完成噪声探索问题,大大地降低毁坏程度,有效地保持图像的边缘和细节。

4 实验结果分析与讨论
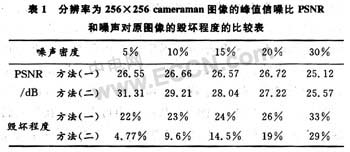
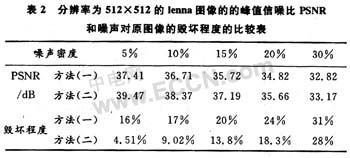
我们用了两个例子将基于最大最小值的波峰波谷滤波方法(一)和本文建议的方法(二)进行了比较。表1是分辨率为256×256 cameraman图像用这两种方法处理过后的图像的峰值信噪比PSNR和噪声对原图像的毁坏程度的比较;表2是分辨率为512×512的lenna图像的处理结果比较。从表1、表2中,很容易看出当噪声密度比较低时建议方法(二)的有效性,尤其是滤波后对图像的毁坏程度远低于原来的方法(一)。当噪声密度比较大时,对参数a作相应的调整(一般应比噪声密度低时小一些)后也能达到比较满意的结果。
5 结 语
在这篇文章中,我们对基于最大最小值的波峰波谷滤波进行了改进,建议了一种非迭代去除椒盐噪声的有效方法。噪声识别中用了文献[7]中的极值方法,另外还考虑了中心象素与其邻域象素的相似性,然后用强有力的最大最小值的方法来估计噪声点的值。建议的方法和基于最大最小值的波峰波谷滤波方法从峰值信噪比和噪声对图像的毁坏程度上进行了比较,实验结果表明无论在消除噪声方面还是在保持图像细节上都明显优于原来的方法,能快速地达到去噪目的。

电源滤波器相关文章:电源滤波器原理
数字滤波器相关文章:数字滤波器原理
评论