逆变电源的模糊自适应整定PID控制方案

1 引 言
本文引用地址:https://www.eepw.com.cn/article/82286.htm随着人们对电质量要求的日益增高,电力电子交流波形精确控制技术成为电力电子技术的研究热点之一。他的主要研究目标是使被控量精确跟踪参考量,并减小电力电子系统交流侧的谐波畸变。为了获得高质量的正弦输出电压波形,人们将现代控制理论应用到逆变电源系统的控制中,提出了很多基于调制策略的控制方法。
PID控制是一种建立在经典控制理论基础上的控制策略,由于其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一,长期以来广泛应用于工业过程控制的各个领域。然而,常规PID控制有许多不完善之处,如控制器的参数在整定好以后,一般不能随着控制系统的实时状况而改变,动态响应比较慢等。
本文将模糊自适应整定PID控制策略引入逆变电源控制,通过对被控对象的参数检测,运用模糊推理,实现对PID参数的实时调整,以达到最佳控制效果。通过仿真实验证明,模糊自适应整定PID控制改善了逆变电源系统的稳定性能,提高了输出波形的质量,使系统兼具良好的动、静态性能。
2 数学模型
图1为一个带LC滤波器的单相全桥逆变器的主电路结构图。
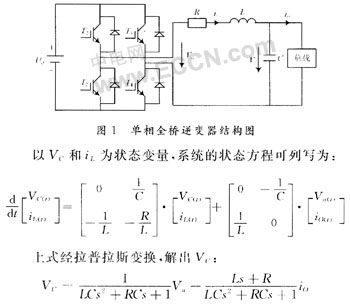
当逆变器空载时,iO=0:
![]()
由于滤波电感等效内阻R很小,此时逆变器可近似认为是一无阻尼二阶振荡环节。
3 模糊自适应整定PID控制
3.1 模糊自适应整定PID控制器原理
人们运用模糊数学的基本理论方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则以及有关信息(如评价指标、初始PID参数等)作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况(即专家系统的输入条件),运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊自适应PID控制。模糊自适应PID控制器目前有多种结构形式,但其工作原理基本一致。模糊自适应PID控制器的结构图如图2所示。
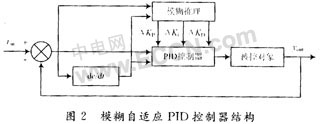
由图2可见,模糊控制由常规PID控制部分和模糊推理两部分组成,模糊推理部分实质就是一个模糊控制器,只不过他的输入是偏差e和偏差变化率ec,输出是△KP,△KI,△KD。PID参数模糊自整定是找出PID三个参数与偏差e和偏差变化率e之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,从而使被控对象有良好的动、静性能。
3.2 模糊自适应PID控制器的设计
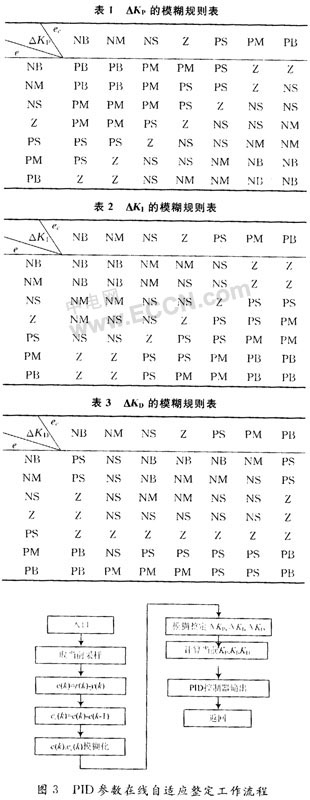
模糊控制器的输入为误差e和误差变化率ec,输出为△KP,△KD,△KD本文2个输入变量e和ec及3个输出变最△KP,△KI,△KD的论域均被划分为7个模糊子集:负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)。模糊子集的隶属函数均为等腰三角形。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊控制规则表,得到针对△KP,△KI,△KD三个参数分别整定的模糊控制表,如表1~表3所示。所以采用的控制规则为:
3.3 PID参数在线自适应整定工作流程
模糊自适应整定PID是在PID的算法的基础上,通过计算当前系统误差e和误差变化率ec,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊推理,实时修正PID参数。其工作流程如图3所示。
4 系统仿真及结果分析
基于以上分析,利用 Matlab/Simulink对本设计系统进行了仿真。控制器采用离散S函数与Simulink模块相结合的方式实现,控制器参数、控制上下限及采样时间采用封装的形式改定。仿真电路如图4所示。
主要参数:开关频率3 kHz。采样频率10 kHz;输入电源为直流500 V;输出为正弦交流电压,电压值位220 V,频率50 Hz;输出滤波电感、滤波电容分别为40 mH,100μF。
在电路仿真过程中,分别使用模糊自适应整定PID控制和普通PID控制对逆变电路实施控制,对两者的输出电压和误差信号的波形进行对比,仿真结果如图5所示。
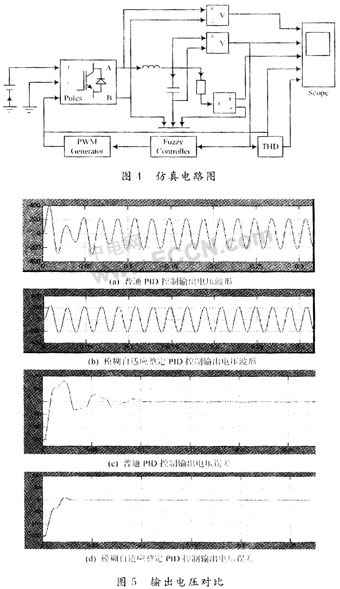
图5(a)和5(b)分别为普通PID控制和模糊自适应整定PID控制时输出电压波形;图5(c)和图5(d)分别为普通PID控制和模糊自适应整定PID控制时输出电压误差的波形。由图可见:在模糊自适应整定PID控制作用下逆变器的动态响应速度快、超调小,输出稳定后其幅值变化量很小,误差值在±1.5 V之内。
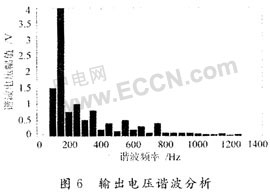
图6为模糊自适应整定PID控制时输出电压的谐波分析。这里只分析到25次谐波,总谐波畸变率THD<3%。
5 结 语
本文提出了一种基于模糊自适应整定PID控制策略的逆变电源控制方案,并进行了理论分析和Matlab/Simulink仿真。从仿真结果可以看出,模糊控制器的引入可以实时修改系统的控制参数,他系统获得较常规PID控制更优良的动态性能。共快速的响应速度和强鲁棒性说明这种自适应模糊控制是一种具有实用价值的控制方案,满足了逆变电源的控制要求。同时办案控制器结构简单、编程方便、实时性好,易于在单片机和DSP上实现。






评论