红外动目标识别跟踪系统硬件设计与实现

引言
本文引用地址:https://www.eepw.com.cn/article/81319.htm视频目标识别与跟踪技术是当今世界重要的研究课题,它涉及图像处理、自动控制、计算机应用等学科,广泛应用于军事领域的各个方面:预警、火控、制导等;在民用领域的应用也随着该技术的日益成熟,以及成本的大幅度下降而逐渐得到越来越广泛的推广。
所谓视频动目标识别与跟踪系统就是一个可以完成图像的采集和处理,从而实现运动目标识别与跟踪的智能信号处理系统。信号处理的本质则是信息的变换和提取,是将信息从各种噪声、干扰的环境中提取出来,并变换为一种便于为人或机器所使用的形式。
红外动目标跟踪与识别系统
系统要求
红外动目标跟踪与识别系统的输入信号是红外摄像机提供的模拟或数字视频信号。该系统通过基于C6X系列高速DSP的数字视频处理卡,实时的处理红外数字视频序列,完成对运动目标的搜索、捕获、跟踪、记忆。并且在PC机上实时显示红外视频图像,实时给出运动目标的空间坐标,产生运动目标区域的特征数据,完成运动目标区域图像的实时存储或远程传输。硬件模块需要为系统功能的实现提供硬件支持,即提供与系统功能相适应的底层物理支持,包括运算处理速度,存储容量等。
能够自动切换输入方式,就是说能按用户的需求选择视频信号的输入方式:这就要求系统既能处理模拟通道的视频数据,又能处理数字通道的视频数据。
模拟视频数字化精度要求:A/D精度为8bit。
数字视频通道的要求:按 RS422传输协议接收数据,像素精度14bit。
系统组成
本系统的模块构成见图1(虚线框内),分为四个模块。
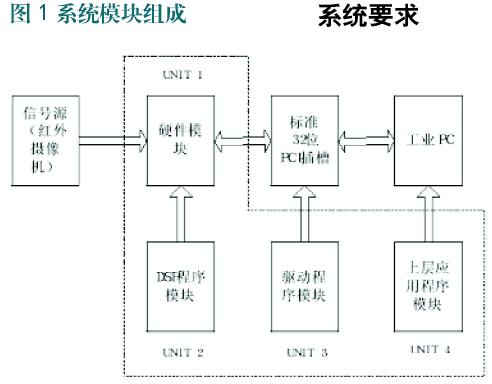
·硬件模块
该模块基于标准PCI总线,并配以超大规模可编程芯片(DSP、FPGA),具有极强的运算、处理能力。
·DSP 程序模块
其功能主要实现运动背景下的动目标检测、跟踪。考虑到系统的实时性要求,运动背景下的动目标检测采用基于摄像机运动补偿的差分技术。首先对摄像机运动造成的全局运动进行补偿,对补偿后的序列图像进行差分运算;然后在差分域搜索目标运动引起的运动扰动区域;最后在原视频图像上分割提取运动目标。同时,采用预测技术对目标的可能位置和存在区域进行估计,以实现实时、准确跟踪(或记忆)目标。系统软件按照其工作状态分为四个状态模块:搜索、捕获、跟踪、记忆跟踪。系统按照搜索、捕获、跟踪、记忆跟踪四个状态及其转换运行,以实现运动目标的实时检测与跟踪。
·驱动程序模块
其主要功能是实现硬件模块与上层应用程序进行数据通信与信息交互。系统采用了PCI 9054 Target 方式的单周期读/写;在图像数据传送的时候为了满足每秒25帧图像的实时传送和处理的要求,采用了PCI 9054的Scatter/Gather DMA方式的数据传输。在整个系统的信息交互中,采用了一次握手协议,也就是请求—应答协议。
·上层应用程序模块
该模块主要功能是向硬件模块下载DSP跟踪程序,启动/停止DSP,实时显示场景视频,对运动目标序列进行实时存储,对运动目标序列的基本特性进行实时分析和结果显示。
在方案设计中,强调了主机控制程序的三个设计准则:界面的简洁性、运行的稳定性和功能的可扩展性。主机控制程序采用了模块化设计,并参照了目前软件设计的先进模型:COM(组件对象模型),这既降低了主机控制程序设计的复杂度,又有利于主机控制程序各模块的调试。
红外动目标跟踪与识别系统
硬件模块
数字视频处理卡的硬件结构示于图2。
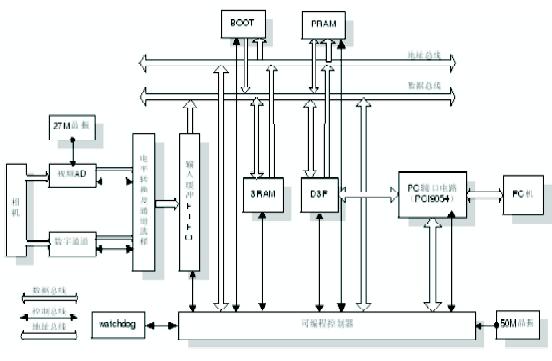
硬件模块的电路结构划分为以下几个单元:视频接口单元、输入输出FIFO、视频图像存储器、数字图像处理单元(DSP)、可编程控制器、与PC机的PCI接口电路等。
视频接口单元
红外运动目标识别与跟踪系统的视频源是红外摄像机提供的视频信号。红外摄像机有两路视频输出,即模拟视频输出和数字视频输出。本系统要求硬件模块对两路视频信号都能够进行处理。因此,必须对输入视频信号进行预处理,为数字图像处理单元提供必要的视频数据和视频同步数据。视频接口单元框图示于图3。
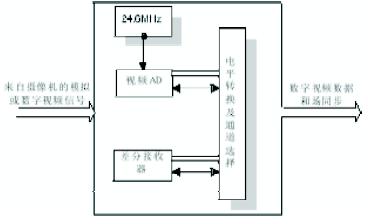
由于模拟/数字通道过来的信号是5V,而后端器件的I/O口电压为3.3V,所以有必要在此增加电平转换器。此外,从图2可看出,模拟/数字通道在进FIFO前合二为一,故此处也需要一条数据总线,模拟/数字通道的数据信号均由此总线进入FIFO。根据这一情况,我们选择IDT公司的QS32XL384电平转换器,为实现通道选择,我们采用两片(每片可以转换20路信号),一片实现模拟信号的转换,一片实现数字信号的转换。通过FPGA对该芯片使能端的控制,实现通道选择。
输入输出缓冲 FIFO
设置输入输出缓冲 FIFO的目的在于:在高速器件和低速器件之间设置一个缓冲区,这样就可以避免高速器件因等待低速器件的数据而使系统的效率降低。A/D芯片送出的数字信号其时钟频率约为12MHz(模拟通道时钟12.5MHz,数字通道时钟12MHz),而处理卡上DSP的总线频率高达50MHz,二者差异较大,所以采用输入输出缓冲FIFO是必要的。基于以上考虑,最终选用的缓冲FIFO是Cypress公司的CY7C4275,它的容量为32K×18,最大存取速度可达到10ns。之所以选取大容量芯片,是为了减少数据传送时总线申请的次数,从而使系统的处理效率提高。
可编程控制器
本系统的硬件逻辑控制电路是采用大容量的FPGA来实现的,采用的芯片是Xilinx公司的XCV50E。该芯片集成了约58000系统门,有16×24个 CLB Array,1700余个逻辑单元,可用I/O口 180个。在本系统中FPGA 控制了绝大部分单元,包括:通道选择/电平转换芯片、输入输出FIFO、SRAM、DSP、PCI接口电路等。利用FPGA芯片的系统内可编程(ISP)性能,完成所有DSP外围芯片的控制逻辑,并在其中设置状态寄存器、命令字寄存器和专用寄存器,完成与主机的实时通信,接收主机传送的命令信息和向主机传送所需要的状态信息。
在本系统中,数字信道为14bit,模拟为8 bit,所以为了简化DSP程序,使其对数字/模拟信号/数据的处理,大部分采用相同程序,所以需要由FPGA对信号进行第一次装配(区别于DSP为了显示而对图像按RGB格式进行的第二次装配),即将数字/模拟信号/数据均转换为16 bit的数据,然后将两个16 bit数据装配成一个32 bit的数据。
数字图像存储器
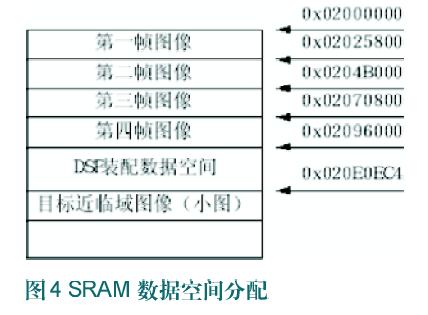
红外动目标识别与跟踪系统要完成对运动目标的识别与跟踪。其实现算法必然涉及到对多帧(差分处理,至少两帧)视频图像的处理。为了给实现算法提供较为充裕的存储空间,我们选用的存储器能容纳6场视频图像。因此,最后选用的存储器是Giga Semiconductor公司的两片GS74116,每片容量为256K×16bit。考虑到我们的视频图像每场的数据量为76800像素,两片512K的SRAM可以存下至少6场视频图像。在本系统中,我们设置了4帧图象存储空间,其余空间用于存放目标小图、DSP装配数据等,数据空间具体地址分配如图4。
数字图像处理模块
CCIR 视频制式的视频信号为50场/秒,由于系统要对数字化的图像进行实时处理,经过权衡运算量和实时性要求,我们取25场/秒,因此每场图像的处理时间不能超过40ms。故要求DSP应具有较高的处理速度。基于以上考虑,DSP采用TI公司的TMS320C6202芯片,芯片峰值性能可达到2000MIPS,本系统DSP时钟为200MHz,芯片峰值运算速度1600 MIPS。
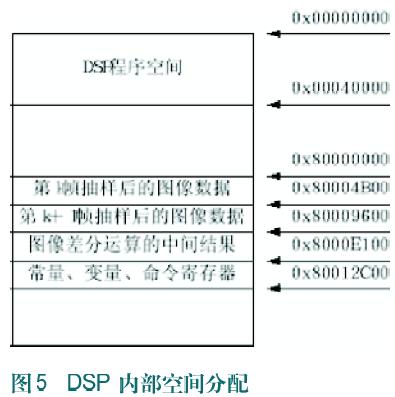
DSP在进行图像的差分运算时,并没有载入完整的各帧图像,因为数据空间有限,若用完整的图像帧进行差分,则由76.8K×3230KByte,加上其它常、变量、寄存器等,至少需要256KByte或以上的数据空间。大大超过芯片设定的数据空间。因此,我们采用隔点、隔行的亚抽样。抽样后,每帧图像大小约为20KByte,总计约需80 KByte数据空间,C6202的片内数据空间足够所需。我们对DSP芯片的内部空间分配如图5。
PCI 接口电路
由于本系统与PC机的接口是PCI接口。为了避免受困于PCI接口繁杂的数据传送协议,充分发挥PCI总线的数据传送能力,PCI接口电路采用PCI9054芯片来实现的。在33 MHz的PCI总线工作频率下,它的最大数据吞吐能力为132Mbyte/s。
PCI9054与DSP的数据交换或通信是通过DSP芯片内部的两个寄存器实现的:XBISA(地址寄存器),XBD(数据寄存器)。即对PCI9054及DSP芯片而言,它们互相并不能直接访问对方的资源,它们之间的数据交换必须由这两个寄存器中继,如图6所示。

系统可靠性研究
可靠性是指系统在规定条件下和规定的时间内,完成规定功能的能力。可靠性工程是为了到达系统可靠性要求而进行的有关设计、试验等一系列工作的总和,它与系统整个寿命周期内的全部可靠性活动有关。
提高系统可靠性的方法有降额设计、简化设计、余度设计、耐环境设计和热设计等。结合本系统硬件模块的现实,本文主要讨论余度设计。
“余度”就是指系统或设备具有一套以上能完成给定功能的单元,只有当规定的几套单元都发生故障时系统或设备才会丧失功能,这就使系统或设备的任务可靠性得到提高。本硬件模块只有一套功能单元和监控/恢复单元。也就是说,只有在系统的相应功能单元发生非物理损坏故障时,本余度设计才能起到预设的作用。从这种意义上讲,本系统采用的是准余度设计。当系统发生非物理损坏性故障时,本设计与典型的余度设计对可靠性的改善是等效的。在本系统的调试和测试过程中,我们发现,真正发生物理损坏性故障,并不多见。超过 95%的故障都是非物理损坏性故障。所以,从实际效果看,该设计是能够起到我们预设的效果的。
根据系统可靠性理论,该设计对系统可靠性的改善,理论计算结果与实际工程效果有着极大的一致性,如图7所示。
从图7我们不难看出,余度设计对本系统可靠度的改善是很明显的。这种针对系统中的可靠性关键环节采用余度技术,对减少系统的复杂性较为有效。
结语
我们研制的红外动目标识别与跟踪系统是一套复杂的高度智能化系统,本系统硬件平台具有超高速的处理能力、强大的数据存储能力、较强适应能力、系统结构清晰简单。所以该硬件平台具备很强的升级能力及一定的通用性。

存储器相关文章:存储器原理

评论