汽车电子之位置传感器(上)

3)霍尔式传感器工作原理:当传感器轴转动时,触发叶轮的叶片便从霍尔集成电路与永久磁铁之间的气隙中转过:当叶片离开气隙时,永久磁铁的磁通便经霍尔集成电路和导磁钢片构成回路,此时霍尔元件产生电压(UH=1.9~2.0V),霍尔集成电路输出级的晶体管导通,传感器输出的信号电压U0为低电平(实测表明:当电源电压Ucc=14.4V或5V时,信号电压U0=0.1~0.3 V)。
本文引用地址:https://www.eepw.com.cn/article/78468.htm当叶片进入气隙时,霍尔集成电路中的磁场被叶片旁路,霍尔电压UH为零,集成电路输出级的晶体管截止,传感器输出的信号电压U0为高电平(实测表明:当电源电压Ucc=14.4V时,信号电压U0=9.8 V;当电源电压Ucc=5V时,信号电压U0=4.8 V)。
(2)捷达、桑塔纳轿车霍尔式凸轮轴位置传感器
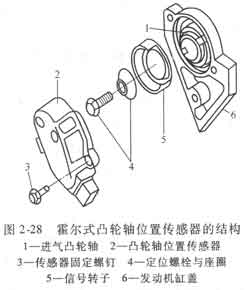
1)结构特点:捷达AT和GTx、桑塔纳2000GSi型轿车采用的霍尔式凸轮轴位置传感器安装在发动机进气凸轮轴的一端,结构如图2-28所示。它主要由霍尔信号发生器和信号转子组成。信号转子又称为触发叶轮,安装在进气凸轮轴上,.用定位螺栓和座圈定位固定。信号转子的隔板又称为叶片,在隔板上制有一个窗口,窗口对应产生的信号为低电平信号,隔板(叶片)对应产生的信号为高电平信号。霍尔式信号发生器主要由霍尔集成电路、永久磁铁和导磁钢片等组成。霍尔集成电路由霍尔元件、放大电路、稳压电路、温度补偿电路、信号变换电路和输出电路等组成。霍尔元件用硅半导体材料制成,与永久磁铁之间留有0.2~0.4mm的间隙,当信号转子随进气凸轮轴一同转动时,隔板和窗口便从霍尔集成电路与永久磁铁之间的气隙中转过。
该传感器接线插座上有三个引线端子,端子1为传感器电源正极端子,与控制单元端子62连接:端子2为传感器信号输出端子,与控制单元端子76连接:端子3为传感器电源负极端子,与控制单元端子67连接。
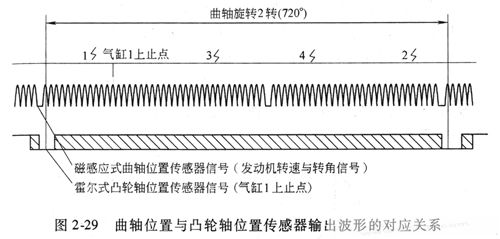
2)工作情况:由霍尔式传感器工作原理可知,当隔板(叶片)进入气隙(即在气隙内)时,霍尔元件不产生电压,传感器输出高电平(5V)信号;当隔板(叶片)离开气隙(即窗口进入气隙)时,霍尔元件产生电压。传感器输出低电平信号(0.1V)。凸轮轴位置传感器输出的信号电压与曲轴位置传感器输出的信号电压之间的关系如图2-29所示。发动机曲轴每转两圈(720。),霍尔式传感器信号转子就转过一圈(360。),对应产生一个低电平信号和一个高电平信号,其中低电平信号对应于气缸1压缩上止点前一定角度。
发动机工作时,磁感应式曲轴位置传感器(CPS)和霍尔式凸轮轴位置传感器(CIS)产生的信号电压不断输入电子控制单元(ECU)。当ECU同时接收到曲轴位置传感器大齿缺对应的低电平(15。)信号和凸轮轴位置传感器窗口对应的低电平信号时,便可识别出此时为气缸1活塞处于压缩行程、气缸4活塞处于排气行程,并根据曲轴位置传感器小齿缺对应输出的信号控制点火提前角。电子控制单元识别出气缸1压缩上止点位置后,便可进行顺序喷油控制和各缸点火时刻控制。
如果发动机产生了爆燃,电子控制单元还能根据爆燃传感器输入的信号判别出是哪一个缸产生了爆燃,从而减小点火提前角,以便消除爆燃。
5.差动霍尔式曲轴位置传感器
切诺基(Cherokee)吉普车与红旗CA7220E型轿车采用了差动霍尔式曲轴位置传感器,其凸轮轴位置传感器均为普通霍尔式传感器。
(1)差动霍尔式传感器结构特点
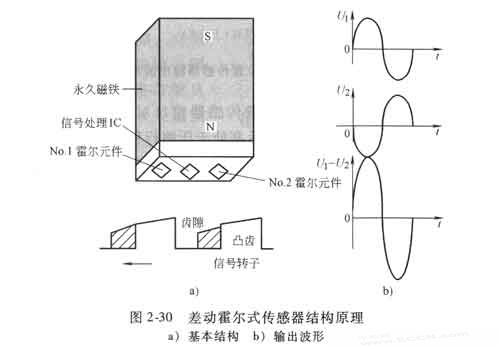
差动霍尔式传感器又称为双霍尔式传感器,其结构与磁感应式传感器相似,如图2-30a所示。它由带凸齿的信号转子和霍尔信号发生器组成。差动霍尔式传感器的工作原理与普通霍尔式传感器相同。根据霍尔式传感器的工作原理。当发动机飞轮上的齿缺与凸齿转过差动霍尔电路的两个探头时,齿缺或凸齿与霍尔探头之间的气隙就会发生变化,磁通量随之变化,在传感器的霍尔元件中就会产生交变电压信号,如图2-30b所示。其输出电压由两个霍尔信号电压叠加而成。因为输出信号为叠加信号,所以转子凸齿与信号发生器之间的气隙可以增大到(1±0.5)mm(普通霍尔式传感器仅为0.2~0.4mm),因而便可将信号转子制成像磁感应式传感器转子一样的齿盘式结构,其突出优点是信号转子便于安装。在汽车上,一般将凸齿转子装在发动机曲轴上或将发动机飞轮作为传感器的信号转子。
(2)切诺基吉普车差动霍尔式曲轴位置传感器
1)结构特点:切诺基吉普车2.5L(四缸)、4.0L(六缸)电子控制燃油喷射式发动机采用了差动霍尔电路的霍尔式曲轴位置传感器。它安装在变速器壳体上。该传感器向ECu提供发动机转速与曲轴位置(转角)信号,作为计算喷油时刻和点火时刻的重要依据之一。
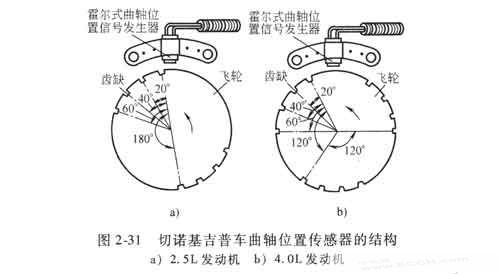
2.5L四缸电子控制发动机的飞轮上制有8个齿缺,如图2-31a所示。8个齿缺分成两组,每4个齿缺为一组,两组之间相隔角度为180。,同一组中相邻两个齿缺之间间隔角度为20。。4.0L六缸电子控制发动机的飞轮上制有12个齿缺,如图2.3lb所示。12个齿缺分成三组,每4个齿缺为一组,相邻两组之间相隔角度为120。,同一组中相邻两个齿缺之间间隔角度也为20。。
2)工作情况:飞轮上的每一组齿缺转过霍尔探头时,传感器就会产生一组共4个脉冲信号。其中,四缸发动机每转一圈产生两组共8个脉冲信号;六缸发动机每转一圈产生三组共12个脉冲信号。
对于四缸发动机,ECU每接收到8个信号,即可知道曲轴旋转了一转,再根据接收8个信号所占用的时间,就可计算出曲轴转速。对于六缸发动机,ECU每接收到12个信号,即可知道曲轴旋转了一转,再根据接收12个信号所占用的时间,就可计算出曲轴转速。
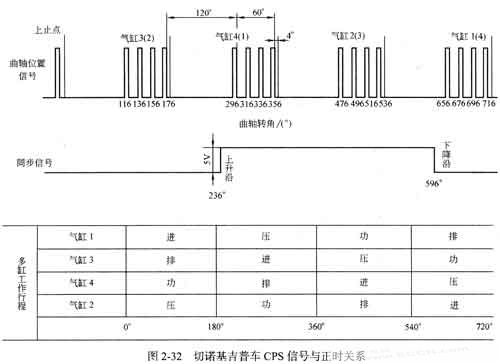
电子控制单元控制喷油和点火时,都有一定的提前角,因此需要知道活塞接近上止点的位置。切诺基吉普车在每组信号输入ECU时,可以知道有两个气缸的活塞即将到达上止点位置。 例如,在四缸发动机控制系统中,利用一组信号,ECU可知气缸1、4活塞接近上止点;利用另一组信号可知气缸2、3活塞接近上止点。在六缸发动机控制系统中。利用一组信号,可知气缸1与6、2与5、3与4活塞接近上止点。由于第4个齿缺产生的脉冲下降沿对应于压缩上止点前4。(BTDC4。),因此第1个齿缺产生的脉冲信号下降沿对应于压缩上止点前64。(BT-DC64。),如图2-32所示。当气缸1、4对应的第1个脉冲下降沿到来时,ECU即可知道此时气缸1、4活塞位于压缩上止点前64。(BTDC64。),从而便可控制喷油提前角和点火提前角。但是,仅有曲轴转角信号,ECU还不能确定是哪一个缸位于压缩行程,哪一个缸位于排气行程,为此还需要一个气缸判别信号(即需要一只凸轮轴位置传感器)。
(3)切诺基吉普车霍尔式凸轮轴位置传感器
1)结构特点:切诺基吉普车发动机控制系统的气缸判别信号由霍尔式凸轮轴位置传感器提供,该传感器又称为同步信号传感器,安装在分电器内,主要由脉冲环(信号转子)、霍尔信号发生器组成。
脉冲环上制有凸起的叶片,占180。分电器轴转角(相当于360。曲轴转角)。没有叶片的部分也占180。分电器轴转角(360。曲轴转角)。脉冲环安装在分电器轴上,随分电器轴一同转动。
2)工作情况:当脉冲环上的叶片进入信号发生器时,传感器输出高电平(5V);当脉冲环上的叶片离开信号发生器时,传感器输出低电平(0V)。分电器轴转一圈,传感器输出一个高电平和一个低电平,高、低电平各占180。分电器轴转角(分别相当于360。曲轴转角)。同步信号的波形如图2-32所示。
当脉冲环的叶片前沿进入信号发生器、传感器输出高电平(5V)时,对于四缸发动机,表示气缸1、4活塞即将到达上止点,其中气缸1活塞位于压缩行程,气缸4活塞位于排气行程;对于六缸发动机,表示气缸3、4活塞即将到达上止点,其中气缸4活塞位于压缩行程,气缸3活塞位于排气行程。
当脉冲环的叶片后沿进入信号发生器、传感器输出低电平(0V)时,对于四缸发动机,表示即将到达上止点的仍然是气缸1、4活塞,其中气缸4活塞位于压缩行程,气缸1活塞位于排气行程;对于六缸发动机,表示气缸3活塞位于压缩行程,气缸4活塞位于排气行程。
利用凸轮轴位置传感器判别出是哪一个气缸即将到达排气上止点之后,ECU根据曲轴位置传感器信号,即可控制喷油提前角和点火提前角。设某一时刻的喷油提前角为上止点前64。(BTI)C64。),当凸轮轴位置传感器脉冲环的叶片进入信号发生器、传感器输出高电平(5V)时,ECU判定四缸发动机的气缸4活塞位于排气行程(六缸发动机的气缸3活塞位于排气行程),此时ECU在接收到曲轴位置传感器(CPS)第一个脉冲信号的下降沿(BTDC64。)时,向喷油器发出喷油信号,从而实现提前64。喷油。在凸轮轴位置传感器输出高电平(5V))时,ECU还判定四缸发动机的气缸1活塞(六缸发动机气缸4活塞)位于压缩行程,此时ECU根据曲轴位置传感器CPS信号和点火提前角计算值,在活塞运行到上止点前点火提前角度时,向点火控制器发出点火指令,控制火花塞点火,实现点火提前。
利用凸轮轴位置传感器对两个气缸的位置判定作为参考点,即可按照四缸发动机1—3—4—2(六缸发动机l一5—3—6—2—4)的工作顺序,对各个气缸进行提前喷油与提前点火控制。
(4)红旗CA7720E型轿车差动霍尔式曲轴位置传感器
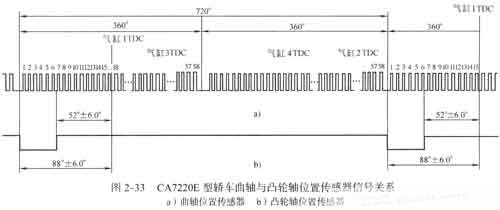
红旗CA7220E型轿车CA488.3型发动机上装备的SIMOS4S3型电子控制燃油喷射系统采用的差动霍尔式曲轴位置传感器由信号转子与信号发生器组成。信号转子为齿盘式,安装在变速器壳体前端,它与捷达AT、GTX型轿车用磁感应式曲轴位置传感器转子相似,在其圆周上均匀间隔地制作有58个凸齿、57个小齿缺和一个大齿缺。大齿缺输出基准信号,对应于发动机气缸1或气缸4压缩上止点前一定角度。大齿缺所占的弧度相当于两个凸齿和三个小齿缺所占的弧度。因为信号转子随曲轴一同旋转,曲轴旋转一圈(360。),信号转子也旋转一圈(360。),所以信号转子圆周上的凸齿和齿缺所占的曲轴转角为360。,每个凸齿和小齿缺所占的曲轴转角均为3。(58×3。+57×3。=345。),大齿缺所占的曲轴转角为15。(2×3。+3×3。=15。),信号波形如图2-33a所示。

传感器相关文章:传感器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
晶体管相关文章:晶体管工作原理
负离子发生器相关文章:负离子发生器原理 风速传感器相关文章:风速传感器原理 分频器相关文章:分频器原理 霍尔传感器相关文章:霍尔传感器原理 晶体管相关文章:晶体管原理 脉冲点火器相关文章:脉冲点火器原理 离子色谱仪相关文章:离子色谱仪原理




评论