汽车电子传感器之输入信号的调理

汽车电子控制系统传输的数据信号主要有以下几种:
1)发动机转速(RPM)信号,它是利用传感器触点的磁阻效应来获得的,其输出一般为正弦信号,此正弦信号的瞬时频率即为RPM。
2)进气歧管压力(MAP)信号,进气歧管压力传感器产生一个O~5V的线性输出,且与进入歧管的空气的绝对压力成正比。
3)发动机温度信号,温度传感器就是一个电热调节器。
4)混合气的空燃比信号,氧传感器产生一个O~5V的线性输出,它与排气管处混合气中的氧气浓度成正比,这是对发动机实际空燃比的测量。
5)节气门位置传感器(TPS)信号。
6)燃油信号,通过测算EFI控制器的喷头感应出的脉冲宽度来获得。
其中前五种信号都与发动机的工况有关,因此它具有十分重要的作用。尤其是对于EFI系统来说,EFI控制器根据这些信号来计算脉宽。而燃油信号对于车辆的行程计算具有重大意义。
![]()
发动机系统、底盘系统上传感器的输出都是模拟信号,需要 先经过模拟电路进行调理或缓冲之后才能送人单片机的A/D转换器或者定时器通道进行下一步处理。离散信号(如电热调节 器的输出)就直接送入A/D通道,时基信号则被送人定时器通道。MCU把送进来的数据变换成8位的PCM编码(基于循环冗余编码)。在每一个循环冗余周期,MCU将对模/数转换器(ADC)通道的每个A/D进行初始化,然后将变换结果和定时器数据的脉宽存储起来,调用存储器中最后一次存储数据形成一个数据帧,再通过UART顺序传送给无线调制解调器。MCU具有三态总线,其上挂接所有的数据通道以及外围设备单元。所有的外围设备都由存储器映射的控制寄存器来控制。
信号调理是把来自传感器的模拟信号转换为用于数据采集、控制过程、执行计算、显示读出和其他目的的数字信号。模拟传感器可测量很多物理量,如温度、压力、力、流量、位置、pH值、光强等。通常,传感器信号不能直接变换为数字量,这是因为传感器输出是相当小的电压、电流或电阻变化,因此在转换为数字量之前必须进行调理。调理就是放大、缓冲或标定模拟信号,使其适合于模/数转换器(ADC)的输入。然后,ADC对模拟信号进行数字化,并把数字信号送到微控制器或其他数字器件中,以便用于系统的数据处理。此链路工作的关键是选择运算放大器,运算放大器要正确地接口被测的各种类型传感器。然后,设计人员必须选择ADC。ADC应具有处理来自输入电路信号的能力,并能产生满足后面ECU的分辨率、精度和取样率的数字输出要求。
2传感器输出信号的调理
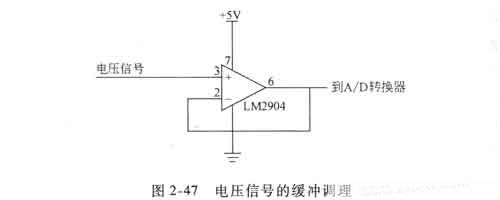
1.电压信号的缓冲调理
如果传感器测得的输出信号是离散的电压信号,那么就可以用图2-47所示电路对其进行缓冲调理。图2-47中LM2904射随接法在此作为电压缓冲器。LM2904输入阻抗高.而日仅需单电源供电。如果汽车噪声比较严重,而且缓冲器效果不明显的话,就需要在输入端加入一个低通滤波电容。
2.燃油电子控制脉冲信号缓冲调理
燃油电子控制单元(ECU)的输出即是电喷油器的控制信号。ECU和电池之间有一个开关管连接,这就保证了在任何发动机需要供油时,喷油器螺线管都能和电池相连。将螺线管等效为一个电感通过一个开关与电池连接。由于螺线管的开关特性,那么12V的高电平就相当于喷油器打开,而低电平表示喷油器关闭(常闭开关)。脉冲信号缓冲调理电路如图2-48所示。
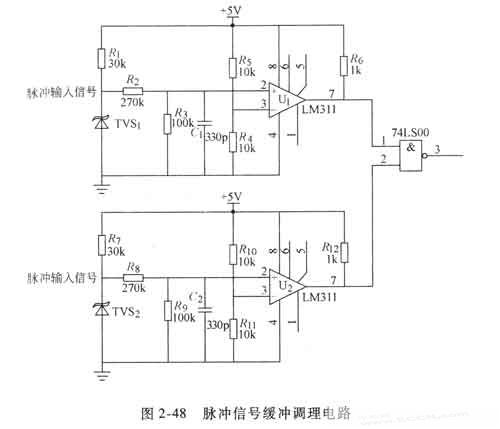
用示波器观察送往喷油器的EFI信号,可以发现高电平几乎可达12V,低电平大约是2-4V,而并没有拉到地电平。另外,LM311的最高输入电压Ucc+0.3V(5.3V)。电阻R3、R4、R5起1/4分压器的作用,这样一来就可以降低EFI信号的动态范围。此时,12V的高电平就相当于3V,而2~4V的低电平就相当于是0.5~1V。这个输出作为电压比较器的输入,比较器将其与Ucc/2(2.5V)相比较。参考点由R1和R2决定。这样调理之后,EFl信号的高低电平就与电源和地一致了。
设计时要注意的主要问题就是喷油器螺线管的回零电压。当EFI信号由低电平变高电平时,螺线管将产生一个300V的回零电压,那么就需要采取分流措施,否则的话,即使是后边的分压环节也不能很好地限制输入电压。为了解决这个问题,现采用一个20V的瞬态电压抑制器(TVS)。它的作用就是将瞬间产生的高于20V的噪声尖峰电压拉到地。这样初步限制了输入电压的范围,再由随后的分压环节进一步将输入电压调整到比较器能够接受的电压输入范围。C3用于滤除高频噪声。ECU需要给喷油器提供接近1A的电流,为了防止ECU的过载,那么整个电路的阻抗与喷油器螺线管阻抗并联之后应大于8Ω,螺线管线圈阻抗是15Ω。当TVS.关断时,缓冲器的输入阻抗将远远大于螺线管的阻抗。尽管如此,当TVS1导通时,整个电路的阻抗就只是TVS1之前部分的阻抗。正是考虑到这个因素,才将分压环节的30kΩ电阻分成两个电阻。R4不仅起到分压的作用,还起到偏置电阻的作用。EFI信号是两组不同相的脉冲信号。由于需要计算所有脉冲信号的宽度,所以这两组EFl信号先通过一个CMOS与非门。其真值表见表2-7。
为了能够应用MCU的定时器电路就能测量EFI信号的脉宽,那么要对信号进行调理而去触发MCU的计数器。脉宽在0.5~2.5ms之间不等。开始由MCU的时钟信号来完成。然而在测试的过程发现,MCU的时钟输出并不能驱动这么宽的范围,而且电压电平与理想的TTL电平相差甚远。然后试验了几种不同的简单模拟缓冲器,都不成功,此时想到了一个简单的方法,就是应用NE955高精度定时器芯片,它内部集成一个方波信号发生器,可以用它来对EFI信号进行斩波。对于一个lms的脉冲,用一个100kHz的斩波器就可以得到足够高的精确度。因此,定时器中所用到的电阻、电容等元件的取值应遵循施密特触发器原理。
3.发动机转速信号缓冲调理电路
由发动机转速传感器的特性可知,发动机转速信号是一个调频信号,幅度不为常数,且动态范围较大。磁感应式传感器所测得的信号幅值将随发动机的转速不同而不同。从某种意义上说,它就相当于是一个波形发生器。发动机转速信号缓冲调理电路如图2-49所示。
![]()
发动机转速传感器输出的正弦波信号,经过R1和VD组成的削波电路,再由R2和C2进行RC滤波,输入LM293反相端,最后输出方波。该电路的施密特特性如下,当LM293输出为高电平时,相当于R4和R5并联,然后与R6分压,此时

而当LM293输出为低电平时,相当于R4和R6并联,然后与R4分压,此时有
这样就产生一个回差电压;△UT=UH-UL,使得电路有很强的抗干扰能力,只要输入信号的幅度大于U5H,即可在输出端得到同频率的矩形脉冲信号。即使传感器输出的正弦波不规则,在传输过程中加入了噪声,也不影响最后的输出矩形脉冲信号。
3 系统中传感器的连接
目前应用的系统要求具有如下的控制特性:更准确,更可靠,更有效,更稳定,还要具有诊断功能。被测量的被测过程应尽可能地与被控制的过程接近。从ECU观点看,传感器可分为两类:本地传感器和远程传感器。远程传感器用来测量远距离控制器的物理量,这就需要提供额外的电源以及控制器与传感器之间的通信线路。而对本地传感器,电源和通信链路已经嵌入ECU中。远程传感器与ECU的连接如图2-50所示。
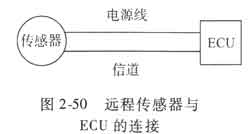
为保证来自传感器信息的传输,完整的回路应该包括电源线、传感器以及信道。对于远程传感器,其通信线通常与电源线是共用的,无须再加线。在某些特殊情况下,例如对轮胎压力监测,传感器和ECU之间常采用无线通信。以往,传感器所测得的数据向ECU传输时采用单向传输,要求与数据线相连的是无源传感器件。随着传感系统功能的增加,双向通信应运而生。为能够在检测过程当中改变操作参数,选择不同的信号源,以及其他更复杂的功能的实现,都需要改变传感器的运行模式。
传感器的接口方式有很多种。对于无源传感器来说,需要在传感器和ECU之间添加必要的电子线路,以实现最基本的功能,以及架起它们之间的通信线路。下面将介绍几种连接方式,另外再介绍几种传感器的安装位置。
1.分立元件式传感器接口
分立元件式传感器与ECU的接口如图2-51所示。

早期最初确定的传感器连接方式就是这种分立元件搭建的。传感器电阻由电阻桥来提供,RC滤波环节用于抗混叠,放大器用于调整合适的放大倍数。如果要加入微调环节及温度补偿环节的话,甚至是只加一个简单的自检环节,所需的元器件数量将更多。
2.集成芯片式传感器接口
集成芯片式传感器与ECU的接口如图2-52所示。

随着混合信号处理技术和集成化技术的发展,ECU上分立元件的数量不断减少,而且还具有信号处理和自检能力。这是通过高性能IC的软件来实现的。由于处理速度的增加,这样可以处理的信号带宽就能更宽,也能获得更多的传感器信息。信号的相关性越大,精确度越高,那么能够处理的带宽就越宽,而且只需要花很低的成本就可以达到获取各种不同传感器信息的功能。
3.数字通信式传感器接口
数字通信式传感器与ECU的接口如图2-53所示。

随着传感器的智能化,就可以调节信号的转移特性,可以进行自检,而且可以在传感器内部进行通信,这样一来,传感器就从一个无源器件变成了一个独立的子系统。对于那些子系统来说,其通信规则由具体的应用情况来定义,而与传感元件无关。这样可以大大减小通信开销,因为高速度采样处理模块已经移植到传感器内部。ECU通电之后即可与传感器通信了,而且还能更有效地利用那些资源。由此可见,器件的数量得到进一步减少,加之使用冗余信道编码等安全协议,可使ECU与传感器之间的通信质量进一步提高。

模拟信号相关文章:什么是模拟信号
传感器相关文章:传感器工作原理
数字通信相关文章:数字通信原理
风速传感器相关文章:风速传感器原理 脉冲点火器相关文章:脉冲点火器原理 施密特触发器相关文章:施密特触发器原理





评论