基于蓝牙与Android设备的控制系统设计

Android操作系统是Google基于开源的Linux操作系统开发的移动操作平台,由操作系统、中间件、用户界面和应用软件组成,是专门为移动终端打造的开放和完整的移动操作系统。Android软件平台包含Java Application、Application Framework、Libraries、Runtime与LinuxOS等层。用户可根据产品的不同需求对系统进行裁剪,从而适应多样的产品需求,Android系统就如同积木一样通过组合不同的软硬件实现不同的应用产品。蓝牙的出现为移动设备的互联提供了一个方便快捷的选择,Android设备和以单片机为处理器的控制器联接使两者的功能得到了互补。
本文引用地址:https://www.eepw.com.cn/article/264461.htm1系统架构
基于蓝牙与Android设备的控制系统由Android设备和下位机组成。Android设备(Android智能手机或Android平板)安装有专门编制的软件。下位机采用ATMEL公司高效的RISC内核的ATMEGA 8为核心,并集成蓝牙串行模块为通信信道。Android设备通过蓝牙将数据发送至下位机,下位机根据接收到数据,完成相应的控制功能,并将处理结果上传,实现实时监测、实时控制功能。下位机只负责数据的采集和实现控制功能,数据的存储和处理在Android设备上实现。
2下位机设计
2.1控制模块的设计
下位机由ATMEAG8、数字温度传感器、电机驱动电路等组成,其中CPU部分电路如图1所示。下位机处理器串口连接蓝牙模块。数字温度传感器将当前温度直接转换成数字信号。蓝牙模块设置为从工作模式。
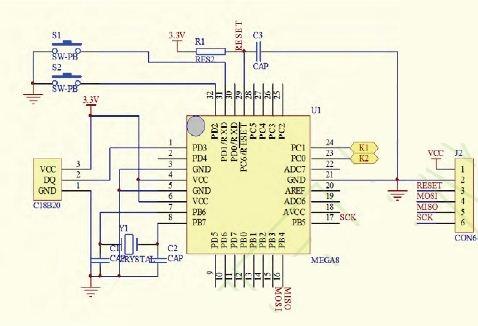
图1 CPU电路原理图
系统上电后蓝牙模块处于等待连接状态,当Android设备第一次发出连接请求时需要输入蓝牙模块的内置密码,以后再连接时则不需要输入密码,只有密码匹配成功才能后成功建立蓝牙连接。蓝牙模块为Android设备和ATMEAG8的通信信道,实现Android设备和下位机的双向数据连接。用户通过Android设备向下位机发送命令,下位机接收到命令后,控制相应的执行模块,实现设定的控制功能。K1和K2为低电平,电机两端电压为0V,电机停止;K1为高电平,K2为低电平电机两端为5V,电机正向转动;K1为低电平,K2为高电平电机两端为-5V,电机反向转动;K1和K2不能同时为高电平,电机驱动电路如图2所示
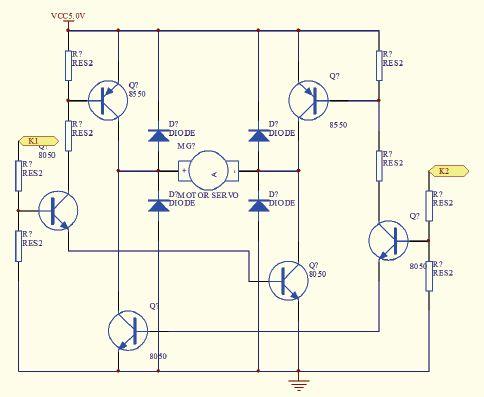
图2电机驱动电路原理图
2.2蓝牙模块
蓝牙模块型号为IDS-BM4A,模块有主/从两种工作模式,通过PIO2电平来选择模块的工作,PIO2为高电平,模块工作在从模式。模块可以有两种应用方式,方式1:从模块上电即开始工作,用户可以通过Android设备查找模块,模块设备名称为“SPP”,查到设备后选择连接,电脑端将提示输入密码,此时输入“0000”,电脑将与模块建立透明连接。方式2:需要两个蓝牙模块,一个设置为主模式,一个设置为从模式,分别与两个MCU连接,上电后主从模块会自动配对连接,连接成功后主从模块将建立透明数据传输,两个设备之间可以直接互发数据。
工作状态指示:模块PIO0用来连接LED,指示当前工作方式。
主模式:
未连接,LED间隔1秒钟快速闪烁2次;已连接,LED常亮。
从模式:
未连接,LED快速闪烁;已连接,LED常亮。
连接状态指示:模块PIO1为连接状态指示,连接成功PIO1为高电平,连接断开PIO1为低电平。
波特率设定表:


linux相关文章:linux教程






评论