同步伺服系统PID模糊控制器设计

颤振试飞历来是飞机试飞最后关注的课题,因为它直接影响飞行安全。在颤振试飞实验中,颤振激励系统是颤振试飞的重要设备之一。
直流伺服系统作为驱动单元,是颤振激励及分析系统研制中技术难度和风险较大的一环,涉及到同步控制、小型特种永磁无刷直流伺服电机技术等一系列问题。本文以LabVIEW 7软件为开发平台,运用LabVIEW 强大的数据采集功能及其PID和Fuzzy logic两个工具箱为该伺服系统设计一个基于虚拟仪器的控制器,完成双电机的同步控制。
2 基于虚拟仪器同步伺服系统控制器的设计
2.1 同步伺服系统的组成
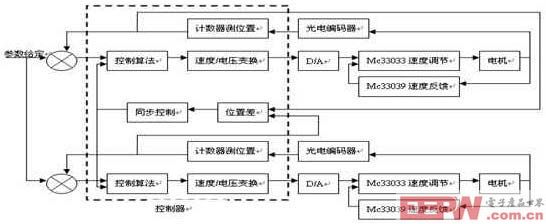
图1 位置--速度双闭环直流伺服系统原理框图
整个颤振激励器的直流伺服系统原理框图如图1。该直流伺服系统主要实现双电机的同步控制,包括实时位置同步、速度同步、差动同步以及速度跟随等功能,采用双闭环控制。外环是位置闭环,利用NI公司的数据采集卡PCI6221的计数器与光电编码器相结合检测电机转子的位置,引入位置闭环既可以较方便的采用先进控制算法又可以将位置差通过同步控制算法形成控制信号以确保同步精度;内环是速度闭环,通过Mc33039芯片检测转子速度,引入速度闭环来提高直流伺服系统的响应速度,同时可以大大削弱系统参数变化的不利影响,抑制摩擦和间隙等非线性的不良作用,具有较高的抗干扰性能。
2.2 控制器的设计
2.2.1总体设计
控制器作为伺服系统的核心,将来自各传感器的检测信息和外部输入命令进行集中、分析和加工,按照一定的程序给出相应的指令,从而控制整个系统有条不紊地运行,因而无疑对整个系统性能的优劣起着非常重要的作用。
PID控制算法是一种工业控制中广泛应用的控制策略,传统的PID控制器具有原理简单,设计简便,易于调整,稳态性能好等优点,对具有线性、有确定模型的系统易于整定到最佳控制效果。但本文的颤振激励系统的同步伺服系统是两台无刷直流电机,均为PWM调速,速度大小与调速电压之间的关系显然是非线性的。为此,首先在不同的调速电压下做大量的试验,来测定转速,然后通过调速电压、速度数据建立一个基本的数学模型;其次将两路位置信号的差值形成的控制信号送入控制算法;最后在传统PID控制器的基础上应用模糊集合理论,设计一个基于简单模型的模糊PID控制器,能方便的实现参数的在线自整定,以达到较为理想的控制效果。
2.2.2电机的数学模型

2.2.3同步算法实现
(1)速度电压关系分段线性化
本同步伺服系统甲、乙两台电机均为无刷直流电机,设计参数基本一致,电机供电电压为直流15伏,采用PWM调速方式。在正常供电情况下,PWM端输入电压信号大于1.4伏,电机开始转动,随着调速电压信号的加大,电机转速开始加快,但是很明显转速和调速电压之间不是线性关系。为此首先测定转速和调速电压之间的关系,然后将其分段线性化,使电机转速在较窄的范围内和调速电压建立近似线性关系,根据实验数据对于甲、乙两组电机分别算出在转速(r/s)不同的情况,调速电压(V)与转速之间的近似线性关系如下:
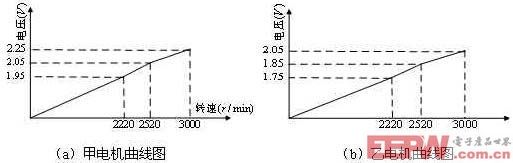
图2:电机转速-调速电压关系曲线
利用这组近似关系,可以确定在固定转速情况下甲、乙两台电机的电压设定值,然后利用数据采集卡PCI6221的计数器,通过LabVIEW编程采集光电编码器脉冲个数(电机每转产生1024个方波脉冲),可以算出此时电机的确切转速,将此转速通过上述近似关系式可以求得对应的实际调速电压值,最后将设定电压值与实际电压值之差进行PID调节。由于电机转速在不同的阶段所对应的比例增益系数、积分增益系数不相同,在同一个转速阶段的上升阶段与平稳阶段所对应的比例增益系数、积分增益系数也不相同。为了达到理想的控制效果,首先利用电机模型及仿真实验结果,以初步确定比例增益系数、积分增益系数;其次通过实验对比例增益系数、积分增益不断进行调整以确定不同阶段的相对应的最为合适的比例增益系数、积分增益系数;最后利用模糊集合理论,建立一个模糊规则库,实现参数的自整定。
(2)建立模糊PID控制器
在LabVIEW前面板或控制面板的tools菜单下面打开 fuzzy logic controller design子选项就可以方便的设计和修改模糊控制器的隶属函数、规则库、推理规则等。设计的结果保存在一个以.fc结尾的文件中,以备在应用程序中调用。Control下面的Fuzzy controller子程序用于在程序中实现模糊控制算法。Control下面的Load fuzzy controller将.fc结尾的文件调入应用程序并将指定文件的PID参数加载到应用程序的模糊控制器中。三者紧密相连环环相扣,能方便直观的完成模糊控制器的设计、编辑、加载。
(3)同步控制
虽然已经建立了初步的模型,并采用模糊PID进行调节,但为了进一步提高伺服系统的同步性,将两者的位置或速度差,乘以适当的系数,形成一个微小值。对速度快者降低电压设定值,对速度慢者提高电压设定值,实现对两台电机的同步控制。由于在转速较低的情况下,电机对对电压信号更为敏感,因而此时系数可以设置的较小,高速时系数可以设置的较大,但两种情况下均不能设的很大,否则会导致电机不稳定。
3.实验结果
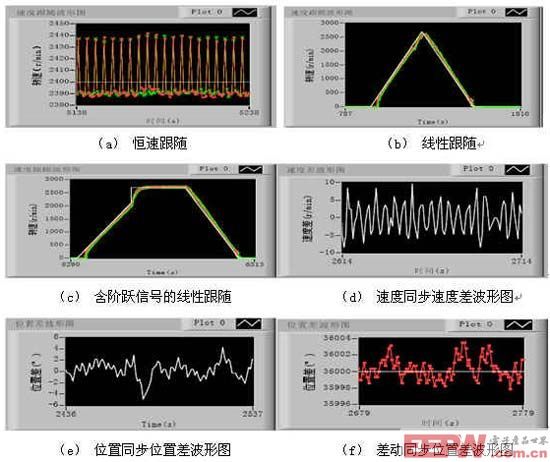
本同步伺服系统共完成了速度跟随、速度同步、位置同步、差动同步四种实验,其中速度跟随包括恒速跟随、线性跟随、含阶跃信号的线性跟随三种。以下图3中a、b、c中白色直线表示设定值,红色●表示甲电机的实验结果绿色×表示乙电机的实验结果; d、e中白色直线表示实际差值;f中白色直线表示设定值,红色●表示实际差值。
4.实验数据处理及分析
(1)对于输入的数字信号,伺服系统能实现如图3中a、b、c所示波形的实时速度跟随。
(2)能够实现两台电机的实时速度同步运行,闭环控制,如图3中d所示绝对误差不累积,相对转速差不累积且可以控制在10r/min以内。
(3)能实现两台电机的实时位置同步运行,闭环控制,如图3中e所示绝对误差不累积,相对角度差不累积且可以控制在±6°以内。
(4)能够实现单台电机预先转动给定角度后,另一台电机才开始转动,然后两台电机保持该恒定相位差同步运行,如图3中f所示,误差控制在±4°。
5.结论
利用本文提及的分段线性法、模糊PID控制理论、以及同步控制法相结合设计的控制器可以实现同步伺服系统的控制要求。利用这些方法和理论可以继续向速度更低或更高的阶段发展,因而即便在更宽的速度范围内也能实现对双电机的同步控制。另外由于本文中控制器的算法较为复杂、程序量较大且都是在操作系统(准确度只能达到毫秒级)的平台上运行,仅执行周期就接近10毫秒,因而我们的调节频率较低为20Hz,如果能设法提高调节频率,相信控制效果会有更进一步的改善。












评论