预防碰撞的摄像头技术

可自动制动的防碰撞系统大多使用支持高速行驶的毫米波雷达,或者适合低速行驶的激光雷达。但需要与车辆进行一体开发,安装车型有限,尤其是毫米波雷达,往往价格较高。而使用摄像头的话,虽然不适合在恶劣天气及雪地上使用,但能够有效降低成本,并且开发出外置型产品应用于售后市场。
使用摄像头的系统大致可以按照摄像头的种类和有无制动控制功能来分类。作为汽车厂商的选装配置安装时,可实现通过ACC(自适应巡航控制)和自动制动等功能。除了富士重工仅用摄像头就实现了这种功能之外,丰田及沃尔沃还通过结合使用毫米波雷达实现了类似功能。宝马公司则利用单眼摄像头实现了碰撞报警功能,新款“1系”选配的系统是只会报警的简单系统。
售后市场方面,使用单眼摄像头的防碰撞系统产品也日益增多。通过结合使用专用摄像头与显示装置来检测行人、车辆及车道偏离的产品。荷兰Mobileye公司在全球42个国家推出了名为“Mobileye C2-270”的产品。智能手机方面也出现了美国苹果的“iPhone”和美国谷歌的安卓终端使用的碰撞报警应用,价格极为便宜。正如现在智能手机实现了导航功能一样,防碰撞系统也在逐步向利用智能手机的方法转移。
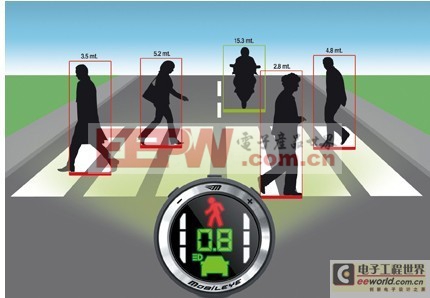
单眼摄像头MobileyeC2-270
总部位于荷兰的Mobileye公司使用1个摄像头来实现防碰撞功能。Mobileye开发的使用单眼摄像头的汽车防碰撞报警系统“MobileyeC2-270”已经销往了全球42个国家,该公司的图像处理SoC“EyeQ2”已经被应用到了宝马新款“1系”和沃尔沃车辆上。此外还被通用和福特及其它日本企业所采用。
5种警示功能
Mobileye C2-270的主要功能包括与前方车辆和行人碰撞警示、车道偏离警示、车距警示。不仅能通过蜂鸣声报警,还能通过显示装置向驾驶者报警。具体的报警功能包括5种:前方车距监测与警示(HMW)、前方车辆碰撞警示(FCW)、低速时前方车辆碰撞警示(UFCW)、行人碰撞警示(PCW)和车道偏离警示(LDW)。
前方车距监测与警示:显示的是本车与前车的车距除以本车秒速得到的数值。当与前车的车距小于2.5s时,显示器将显示车距的秒数。当车距小于事先设定的秒数时,代表车辆的图标将变成红色,并鸣响“哔”的警报蜂鸣声。检测距离最远为90m左右。
前方车辆碰撞警示:在碰撞可能发生之前2.7s,车辆图标将变成红色,同时大声发出“哔哔哔哔”的警报,提醒驾驶者踩制动踏板。
低速时前方车辆碰撞警示:也叫做虚拟保险杠。事先在自车保险杠前方1~2m处设定虚拟保险杠,在时速低于30km以下的情况下,当前方车辆接近到触碰虚拟保险杠的距离时,鸣响“哔、哔”的警报声。其作用是防止堵车和等红绿灯时发生碰撞。
行人碰撞警示:该功能在检测到前方30m以内有行人时,首先会点亮红色的行人标志,在行人进入危险距离,可能发生碰撞的2s前发出“哔-哔-”的蜂鸣声。
车道偏离警示:当汽车时速达到55km/h以上,无意偏离车道时,显示器将显示偏离一侧车道的标志,同时发出“嘟嘟嘟嘟嘟嘟嘟”的警告声。如果是打开转向灯变更车道,则判断为有意偏离车道,不会发出报警声也不会显示图标。
由于每种警示的报警声各不相同,因此在熟悉之后,驾驶者无需查看显示装置,根据声音即可判断出警示的种类。
小型、低成本化
为了提高检测性能,使用摄像头的防碰撞系统必须在安装时对摄像头位置进行输入和校正。立体摄像头必须仔细调节两个摄像头之间的距离和安装角度。如果把摄像头数量减少到1个,就能够减少校正作业耗费的时间和劳力。
与采用立体摄像头的方式相比,单眼摄像头可检测的距离虽然偏短,但通过改进图像处理技术可以缩小差距。
C2-270由摄像头单元、显示装置和电缆盒构成。电缆盒使用CAN总线等从车辆读取速度、制动器、雨刷、方向指示器、远光灯的信号。C2-270除了摄像头单元和摄像元件之外,还内置了核心部分——图像处理SoC。
EyeQ2能够同时处理汽车预防式安全系统和防撞辅助系统所必须的以下检测:前方车辆、车道线、与前方车辆的距离、与前方车辆的相对速度和相对加速度、车道内的前方车辆、弯道、行人。
关于车辆检测,识别车辆依照的是对三个特征的检测,分别是车辆后部的矩形检测、后轮检测、两个尾灯的检测。系统将通过比对预先保存的几十种车辆形状的图案,判断前方物体是否为汽车。如果是汽车,系统可以判断出后轮轮胎的位置。而尾灯则是夜晚重要的检测要素。
在识别车辆时,CMOS传感器上的车宽需要达到13个像素以上,这相当于与车宽为1.6m的车辆相距115m。从CMOS传感器的性能来看,前方的识别限度约为90m。
车道线的检测数据将用于车距监测及警示、前方车辆碰撞警示。50m远的宽度为10cm的车道线在CMOS传感器上相当于两个像素。系统将从摄像头图像中识别出车道线,根据摄像头的视野和在前窗上安装的位置等信息计算出车道线的宽度及其与车辆的相对位置,利用卡尔曼滤波器推测车道线。
与前方车辆的距离是利用“远近法原理”计算得出的。因为摄像头的地面高度(H)已知,所以,路面上前方车辆接触地面的位置比水平面上无限远的一点(延伸焦点,FOE:focusof expansion)略低几度。
映射到摄像头内部的CMOS传感器上的图像的高度(y)随与前车(后轮轮胎与道路的接触面)的距离而变化。摄像头的焦距(f)同样为已知条件。按照“H∶Z=y∶f”计算,即可求出与前车的距离Z。而且,距离碰撞的时间也可以根据“Z相对速度”的公式求出。
行人检测的难度要大得多。行人不同于车辆,动作、服装、身体各部分的变化要素很多,而且还需要与街上的建筑、汽车、电线杆、树木等背景图案区分开来。为了在有人走向行驶车道时尽可能缩小检测延迟,对于车道外行人的检测必不可少。因此可以容许出现某种程度的误判。提高行人检测的精度依靠的是“单帧分类”和“多帧认证”两个步骤。首先通过“单帧分类”判断出“好像是行人”,然后再转入“多帧认证”,当检测到行人进入车道内时提高等级,采取立即发出报警等处理方式。
在行人识别中,系统将把推测为行人的图像分成9个区域提取特征,结合多帧的动态变化提高精度。识别到的VGA分辨率的纵长长方形行人图像将在调整到12×36像素后进入“单帧分类”处理。根据汇总了3~25m范围内15万个广泛的行人事例(考虑到了动作和停顿、照明、背景图案、气象条件、天气下的可视条件等)的测试数据集进行分类。
技术弱点
采用摄像头技术的防碰撞报警系统也存在弱点。因为是基于摄像头进行图像识别,所以人眼看不到的东西无法识别。在识别车道线时,掉色的车道线、在雨雪覆盖下难以辨识的车道线可能无法识别。
在隧道的入口和出口附近,前方车辆与隧道影像重叠也可能造成误报;前方车辆映照在被雨水淋湿的道路上的倒影也有可能造成误报;当太阳位于靠近地平线的正前方时,摄像头有时会无法正确识别前方车辆;而且,当摄像头正前方的前窗上有水滴时,系统有可能发生鱼眼镜头效应,对前方车辆的大小判断错误。
为了改进以上问题,Mobileye公司已经着手开始改进图像处理SoC。目前正在与意法半导体合作开发名为“EyeQ3”的第3代产品。计划在2014年开始供应配备该SoC的产品。EyeQ3内嵌4个支持多线程的“MIPS32内核”,每个CPU内核都配备了VMP(vector microcode processor)。公司计划通过灵活分配控制与数据处理,使其性能达到EyeQ2的6倍。而且还计划实现支持多摄像头输入等大容量影像数据处理。如果除了前方之外,摄像头还能安装在后方和侧面用以获取信息,应该能实现更可靠的防碰撞报警系统。
富士重工立体摄像头EyeSight
2008年,富士重工推出了配备驾驶辅助系统“EyeSight”的“力狮”及其摄像头单元、图像处理LSI。“EyeSight”系统采用立体摄像头实现预防碰撞和0~100km/h的巡航控制。EyeSight使用立体摄像头而非毫米波雷达或激光雷达来测量与前方车辆及行人间的距离。当有与车辆前方的障碍物相撞的危险时,会通过警报、警告灯及警告制动提醒驾驶者注意,之后自动实施制动。
减轻碰撞伤害
虽然在碰撞前1.4s实施制动,从技术上来说也能做到避免碰撞,但为避免导致驾驶者过分依赖系统,所以富士重工在当年的宣传中强调,只能做到“减轻由碰撞导致的伤害程度”。
当时展示的摄像单元由日立制作所制造,在铝合金制造的机身上配备了ECU(电子控制单元)和两个30万像素的黑白CCD。在ECU上配备了同为日立制作所制造的图像处理ASIC以及其它多个微处理器。图像处理IC由原来能够编程但价格较高的FPGA改成了ASIC,削减了芯片成本,并提高了处理性能。该IC能够通过识别图像的各像素来判断车辆与对象物间的距离,瞬间将信息发送至控制电路。控制电路将移动速度与本车车速相同的物体判断为周围环境,将其它障碍物识别为前方车辆及行人等。
在系统中,摄像单元与发动机ECU以及制动助力器ECU联动,经由传输速度为500kbps的CAN从摄像头单元向各ECU发出加减速指令。减速时通过减小发动机输出功率、启动制动助力器来降低车速。另外,车速等车辆信息由发动机ECU和防侧滑装置收集,对驾驶者显示的信息将输出到仪表板上。
进一步的技术改进
两年后,富士重工业强化了使用立体摄像头的驾驶辅助系统“EyeSight”的功能。不仅可启动自动制动器避免与前方车辆或障碍物发生碰撞,还能在使用前方车辆追踪功能时使车辆保持停止状态。富士重工强化了预防碰撞安全功能与前方车辆追踪功能。预防碰撞安全功能可在与前方车辆的相对速度低于30km/h、碰撞可能性较大的情况下,启动自动制动器,以避免发生碰撞。在相对速度超过30km/h的情况下,则能减轻碰撞的伤害程度。尽管上一代系统也会在碰撞可能性较大时启动自动制动器,但只能减轻碰撞的伤害程度。
前方车辆追踪功能方面,在堵车等情况下车辆停止行驶时,原来只能通过启动ESC(防侧滑装置)保持停止状态两秒钟,随后车辆会在发动机蠕动力(Creep)的作用下开动。如果堵车时前方车辆长时间停车,就需要驾驶者踩下制动踏板,辅助功能十分有限。
改进后系统提高了辅助功能,即使堵车时前方车辆长时间停车也能使车辆保持停止状态。在最初的两分钟内,可通过启动ESC的油压泵,使车辆保持停止状态。之后,ESC停止工作,代之以EPB(电子驻车制动)启动并机械性固定制动钳。这样便可长时间保持停止状态。
另外,前方车辆追踪功能方面,将ESC的减速度提高到了0.4G,即上一代系统的1.6倍,即使在高速公路上行驶时前方车辆紧急减速的情况下,也能在与前方车辆保持距离的同时追踪行驶。






评论