基于DSP控制系统的离散模型参考自适应算法在燃料电池车中的应用

l 燃料电池车及其离散MRAC电机控制系统
本文所研究的燃料电池车电机是型号为XQ-5-5H的5 kW直流牵引电机,对电机的控制采用包括电流环和速度环的双闭环调速系统,其结构框图如图1所示。图中虚线方框内由以DSP为核心的控制系统来实现。本文主要探讨其软件的没计。
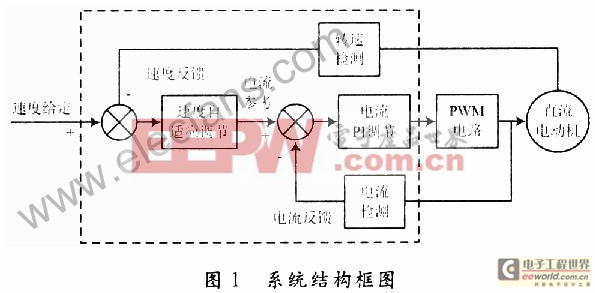
对双闭环调速系统的设计在此不做详细讨论,这里只给出设计结果。对电流的调节采用传统的PI调解,其传递函数为:

式中:K为PI调节器比例部分的放大系数;τ为积分时间常数。
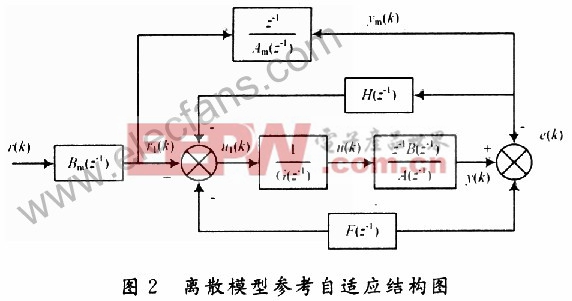
对速度的调节采用自适应调解方法,为了便于计算机实现,采用离散模型参考自适应控制,结构图如图2所示。对于其具体说明参见文献。
2 控制系统软件设计
2.1 硬件系统介绍
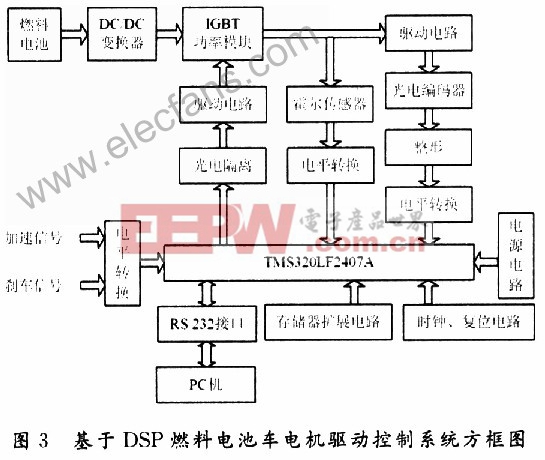
基于FMS320LF2407A的燃料电池车电机驱动控制系统硬件系统方框图如图3所示,主要包括给定信号检测电路、电流检测电路、速度检测电路、PWM输出电路和DSP外部电路。
 2.2 主程序设计
2.2 主程序设计
主程序包括初始化程序和循环等待2部分。系统上电或复位后主程序自动运行,它首先将系统初始化,主要包括硬件初始化即根据要求给各种硬件如时钟及看门狗模块、I/O模块、定时器、SCI模块、ADC模块、定时器、控制寄存器等赋值,以便各模块正常工作,以及程序全局变量初始化,主要包括电流PI调节、转速自适应控制调节参数初始化以及其他全局变量初始化,然后开中断并等待。
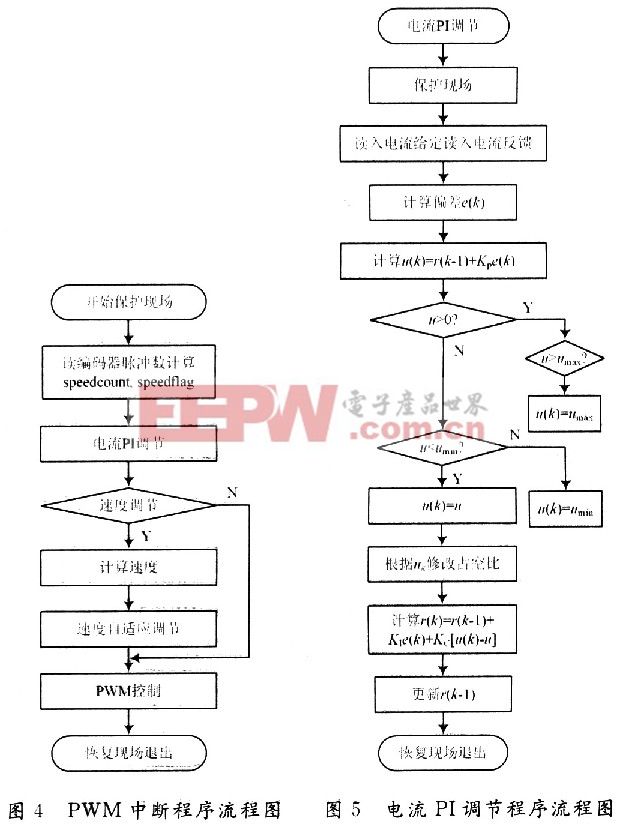
2.3 PWM中断处理程序设计
采用定时器周期中断标志启动A/D转换,当T1下溢时启动A/D转换,所检测的电流经处理后接模/数转换器的ADCIN00引脚,当转换完成后,中断标志位都被设置为1,则在A/D中断服务程序中将转换结果读出,完成1次A/D采样。转换结束后申请PWM中断,PWM中断完成主要的控制功能,流程图如图4所示。由于电机控制系统的机械时间常数远大于系统的电气时间常数,系统的速度环控制周期可比电流环控制周期大。该系统在每个PWM周期中都进行一次电流采样和PI调节,因此电流采样周期与PWM周期相同,可以实现实时控制,而速度环控制周期选为每100个PWM周期,对速度进行1次调节。在每个电流控制周期,被QEP单元计数的脉冲数被累加到变量speedcount中,变量speedflag从初始值speedstep(100)开始减1直到等于0,此时读取100个电流控制周期(1个速度控制周期)的总脉冲数进行速度计算,并将speedcount清零,将变量speedflag赋初始值,开始下一次速度脉冲计数。
2.4 电流PI调节器程序设计
式(1)给出的调节器为连续传递函数,为了便于计算机的实现,使用防积分饱和的PI调节器,其算法改进为:
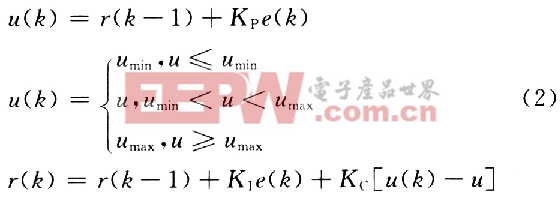
式中:KI=KP/τ;KC=KI/KP=T/τ,根据防饱和的PI调节器算法确定系统流程图如图5所示。
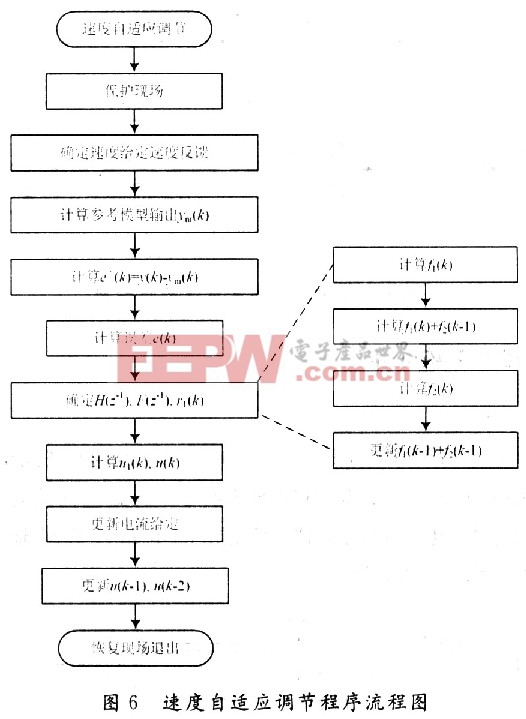
2.5 速度自适应程序设计
速度自适应调节算法在图2中已经给出,该算法为离散自适应算法,可直接用于程序设计。离散模型参考自适应分为参考模型和被控对象两部分,所以首先讨论参考模型的实现。对于二阶参考模型其离散方程可表示为:
这样可以得到参考模型输出。被控对象速度输出y(k)由速度检测电路检测,可得预报误差:
可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。
3 结语
自适应控制理论在燃料电池车电机控制系统中的应用,对于提高电动汽车的驱动性能具有较好的效果。本文探讨了在电机DSP控制系统中,离散模型参考自适应算法的实现,对于各种先进的控制策略在电动汽车中的应用进行了积极的探索,对于推动电动汽车产业的发展具有重要意义。











评论