基于激光测距的车辆宽高检测系统设计

随着我国经济的快速发展,高速公路建设和公路运输规模都得到了前所未有的发展,由此带来的车辆超限超载现象也日益严重。超限运输一方面会缩短公路和桥梁的使用寿命,另一方面会造成车体形状的改变及车辆性能的下降,形成交通安全的严重隐患。目前,车辆超宽超高治理作为治超工作的重要组成部分,大多还处于人工阶段,主要由工作人员用卷尺或者竹竿实测宽高,既增加了工作人员的工作量,又降低了工作效率。为实现超竟超高治理工作的自动化和智能化,采用激光测距技术,选用基于ARM Cortex-M3内核的处理器LM3S8962,设计开发了一套智能车辆宽高检测系统。本系统可对行进车辆进行高精度动态扫描,实现宽高检测。
1 激光测距传感器的选择
激光以其高亮度、高方向性、高单色性等优点,被广泛应用于各种测量领域中。激光测距相比红外测距,超声波测距等方式,具有速度快,实时性强,获取数据精度高等特点。激光测距技术已在汽车防撞,建筑或空地安全监护,轨道交通等领域得到了广泛地应用。为了满足高速公路车辆宽高检测系统测量速度快,测量精度高的要求,还考虑到系统能在能见度较差的环境甚至夜间工作,系统选用德国SICK公司生产的LMS型双脉冲激光测距传感器。
LMS激光传感器是一种户外型非接触式的高精度、高解析度外部传感器,其工作原理是基于对激光束飞行时间的测量,其按照定义好的时间间隔发出激光脉冲,通过定时器计算发射脉冲和接收脉冲之间的时间间隔来得到与被测物体之间的距离。脉冲激光束经过测距传感器内部的一个旋转反光镜的反射对周围环境形成扇面扫描。激光扫描测距的工作原理如图1所示。
目标物体的轮廓线由所接收刭的一系列脉冲序列来确定。LMS激光传感器的扫描频率是25 Hz/50 Hz,角度频率是0.25°/0.5°,扫描角度范围是0°~270°,最大扫描距离是20 m,标准测量精度为±30 mm,安全防护等级为IP67,对人眼安全。恶劣的环境因素对测量范围没有影响,可用于室外温度-30~+50℃的环境中。
2 系统构成及工作原理
智能车辆宽高检测系统通过对车辆进行连续动态扫描,采集车辆的外形轮廓信息,并将采样数据实时传递给控制单元,控制单元通过处理、分析、计算采样数据,得出车辆实际的宽度和高度,并将测量值显示在液晶屏上,供现场工作人员查看,同时根据国家规定的限宽值和限高值判断被测车辆能否通行。本系统能够手动设定限宽值和限高值,可以对行进车辆进行实时检测,具有声光报警和语音提示功能。系统在实际应用时,要求行进车辆车速控制在20km/h以下。实时快速测量也可避免交通拥堵现象。
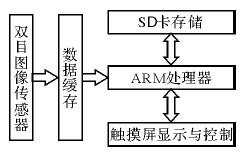
智能车辆宽高检测系统选用LM3S8962作为主控制器。LM3S8962是一款基于ARMCortex-M3内核的低功耗、高速度处理器。LMS激光传感器通过500kb/s的高速串行接口将测量数据传送给主控制器,不会造成数据的丢失。控制器将接收到的扫描数据进行处理,由于其内部数据存储器空间大,不需外扩数据存储器。系统结构框图如图2所示。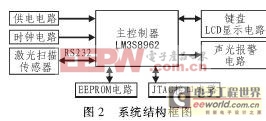
3 硬件电路设计
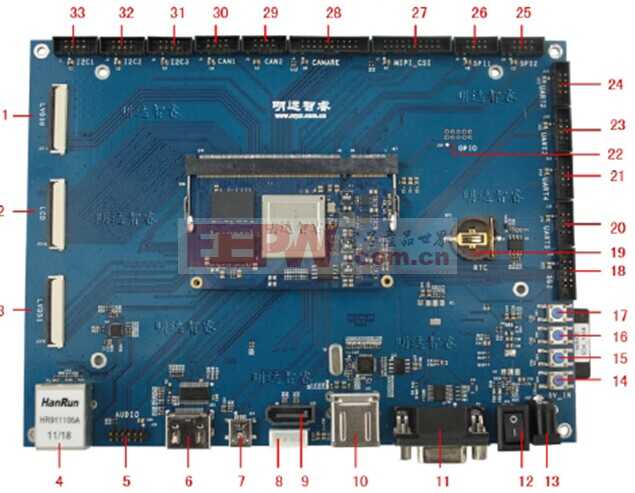
智能车辆宽高检测系统电气控制部分以基于ARMCortex-M3内核的LM3S8962处理器作为控制核心,按功能可划分为以下模块:电源模块,主控制器模块、时钟模块、数据通讯模块、键盘输入模块、液晶显示模块、继电器控制模块等,以下对3个部分作较详细介绍。
3.1 主控制器模块设计
采用ARMCortex-M3内核的微控制器LM3S8962作为系统控制核心。Cortex-M3内核采用ARMv7-M架构,它紧凑地结合Thumb-2指令集,采用哈佛处理器架构,与ARM7TDMI相比,比Thumb指令每兆赫的效率提高了70%,比ARM指令提高35%。由于Thumb-2指令是Thumb指令的扩展,16位和32位指令共存于同一模式下,复杂性大幅下降,代码密度和性能均得到提高。LM3S8962时钟频率高达50 Hz,多达36个中断源具有8个优先等级,提供系统时钟,256 kB的FALSH,64 kB的SRAM,休眠模块,通用异步收发器,通用定时器,PC接口以及其他丰富的外设接口,可方便的对各种现场设备进行有效控制。图3为LM3S8962的外设接口及其外围电路(时钟、复位、UART接口等)。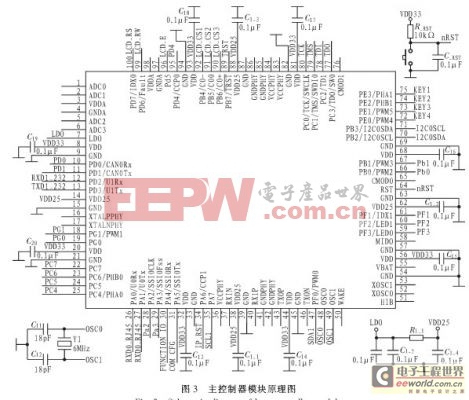
3. 2 数据通讯模块设计
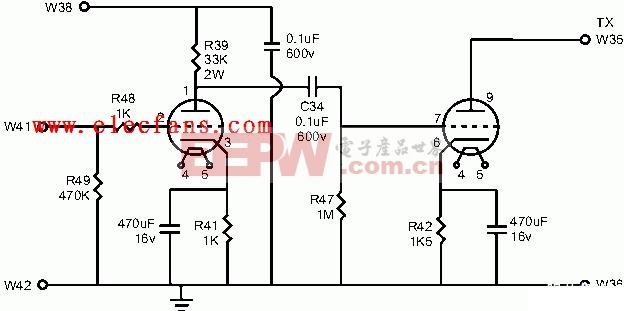
将激光传感器扫描得到的极值坐标信号通过通用异步收发器(UART)传送给微控制器,选用了MAX232进行RS232电平转换,如图4所示。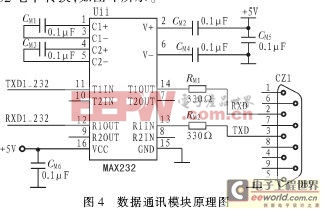





评论