机器人控制系统运动学方程

为什么使用运动学?3自由度起重机
3自由度(DOF)起重机是一个相对简单的机器人系统,用户可以控制起重距离、起重机回转角度和起重机的倾角(见图1)。通常一台起重机还有第四个自由度——起重物体的悬挂高度,这里不考虑此自由度的作用,并不会影响分析结果的普适性。

图1 一台如图所示的三自由度起重机,允许用户控制起重距离、回转角和倾斜角,但是不允许起重机的工作端作直线运动。资料来源:www.rki-us.com
通常,起重机的起重臂旋转路径就像一个圆弧,而且,如果起重臂倾斜角增加,终端受动物体(起重机末端的起重物)就会沿着圆弧路径向上。这些自然形成的轨迹对于某些环境是可以接受的,然而,一旦用户希望起重物体的运动路径是由很多线段组成的话,该怎么办?或者是在任意三个方向上的随意形状,又该如何?例如起重物体是某些测量设备或者图像采集系统。简单的例子是将起重物体沿着方形轨迹移动,这对于一些系统是很有用的。
那些学习过坐标几何学的人应该对起重机的受控坐标系统很熟悉——通常就是球坐标系。空间中的一个点可以用球坐标系中的三个参数来表征:距离原点的距离、x-y平面上距离x轴的方位角θ(0 – 2π区间)和与z周的夹角θ(0 – π区间)。球坐标系的图例如图2所示。
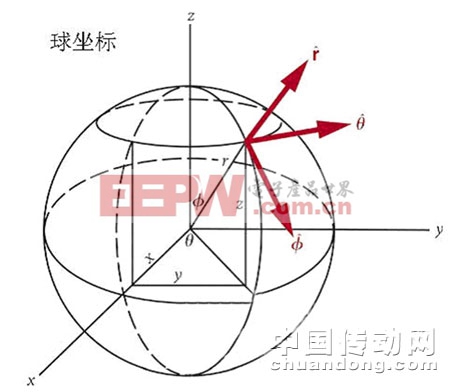
图2 那些学习过坐标几何学的人应该对起重机的受控坐标系统很熟悉,通常就是球坐标系。

陀螺仪相关文章:陀螺仪原理










评论