机器人控制系统运动学方程
为了解此系统的反向运动方程,必须确定平台种类以及执行器汇聚点的位置,因为脚长就是点与点之间的距离。平台执行器所处位置用基点坐标系表示如下:

上述等式的下标表明了向量的参考坐标系。这里,点的位置实际上是齐次坐标,以(x, y, z, w) 或者 (x/w, y/w, z/w)的形式表述,为了简化讨论,这里的w我们可以令其等于1。R是变换矩阵,可以将平台点(Ppi)也就是平台系数转换成(Bpi),也就是基座系数。R是3×4的矩阵,包括3×3的旋转矩阵和3×1的平移矩阵。
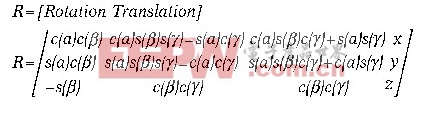
在R等式中,“s”代表正弦函数;“c”代表余弦函数。上述等式中的旋转矩阵是单位矩阵,用来变换roll、pitch和yaw三个向量的方向。平移矩阵就是一个简单的向量。由于(Bbi)的值是已知的,所以一旦知道了(Bpi)的值,就可以通过计算两点的距离得到脚的长度。

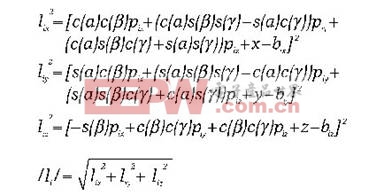
上面的等式实际上很简单,但是由于引入了矩阵理论,所以有很多项。下面是最终的反向运动方程(对于脚“i”)。
此系统的前向运动学方程相对复杂一些,由于处理上的要求,前向方程也不容易解。这里,比直接解方程更好的方法是使用迭代法,初始估计值代入方程、更新,然后重复,直到估计值的误差小于某一限定值。具体的计算方法在此就不再赘述,此方法对于以下的过程都可以通用。此方法是前文提及的牛顿迭代法的推广。关于此方法有很多相关文章,本文在此着重讨论前向运动方程的应用。第一步是估计初始姿态K,或者换种说法,估计(α , , γ, x, y, z)的值。对于一个运动控制器,初始估计值通常是(α , , γ, x, y, z)的受控位置。从此估计值,反推运动学方程,可以计算出执行器的长度,称之为 (g1, g2, g3, g4, g5, g6) ,或者以向量的形式写成g.,数学表达式如下:g = I(k)。
然后,基于估计值算出的长度与来自反馈设备的实际长度I相比较,得到“估值误差”e,可以写成e = g – l。
如果估值误差小于某一个限定值,那么此过程就此结束。如果估值误差不小于这个限定值,那么,就需要一个更好的估计值。这个过程一直重复,直到估计值足够完美(此时,这个估计值就被作为方程的解!)为了理解如何从数学上确定一个“更好的估计值”,首先考虑下面这个简单的微积分学例子。假设我们有一个通用函数y = f(x),f是非线性的。如果我们要计算由x的变化所导致的y的变化,下面的等式有效:


陀螺仪相关文章:陀螺仪原理











评论