配视觉系统的直角坐标机器人的应用实例

机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。
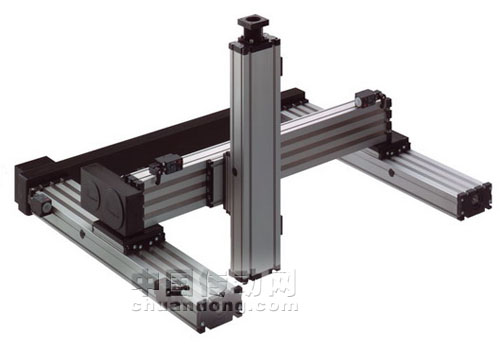
直角坐标机器人主要由一些直线运动单元,驱动电机,控制系统和末端操作器组成。针对不同的应用,可以方便快速组合成不同维数,各种行程和不同带载能力的壁挂式、悬臂式、龙门式或倒挂式等各种形式的直角坐标机器人,从简单的二维机器人到复杂的五维机器人就有上百种结构形式的成功应用案例。从食品生产到汽车装配等各行各业的自动化生产线中,都有各式各样的多台直角坐标机器人和其它设备严格同步协调工作,可以说直角坐标机器人几乎能胜任所有的工业自动化任务。下面是其主要特点:
1 任意组合成各种结构样式,带载能力和尺寸的机器人,
2 采用多根直线运动单元级连和齿轮齿条传动,可以形成几十米的超大行程机器人。
3 采用多根直线运动单元平连及各带多滑块结构时其负载能力可增加到数吨。
4 其最大运行速度可达到每秒8米,加速度可达到每秒4米。
5 重复定位精度可达到0.01mm~ 0.05mm。
6 采用带有RTCP功能的五轴或五轴以上数控系统能完成非常复杂轨迹的工作。
二 德国VC视觉系统简介
机器视觉就是使机器有人眼和大脑的部分功能,能自动进行几何形状测量,印刷质量缺欠识别和产品外观质量识别等工作。机器视觉系统通常用在全自动化、高效可靠和非接触的大批量生产过程中的检测识别工作。常见的视觉系统一般包括:光源、镜头、CCD摄相机、图像采集卡、图像处理软件、监视器、通讯/输入输出单元等。而许多智能相机就是一个通用图象处理系统,把镜头、图象传感器、高速DSP、存储器、常用图像处理软件、通讯口和/输入输出口等集成在一个香烟盒大小的盒内,用户可以任意编程,能代替基于PC机的图象处理系统。智能相机有彩色智能相机和黑白智能相机,有线阵和面阵智能相机,本文仅介绍一款德国VC公司面阵黑白CCD智能相机。
工作时首先CCD智能相机将被摄取目标转换成灰度图像信号,先放大该信号,再数字化为数字图像。数字图像以二维矩阵存储起来,如Vision Components GmbH公司智能像机VC2028的每一幅数字图像都是640*480的二维矩阵。该矩阵的每一个元素叫像素,它的数值通常是0~255。像素的数值0~255对应目标的最暗和最亮处。图像处理软件就是根据图像中像素分布和亮度变化等信息抽取图像中目标的特征,如:孔的数量、面积、形状、长度、形状宽度和位置等,还可以是亮度变化等,然后与所存的模板进行比较匹配,最后给出尺寸、角度、偏移量、个数、合格/不合格、有/无等。结果。
用户可以在PC机上用C语言或VC编写自己的应用程序,然后下传到智能相机里,智能相机运行该程序来完成特定的任务。也可以选用VC公司配带的图象处理软件。
三 机器人数控系统
该机器人的控制系统采用德国运动控制技术公司(Movtec)的三轴运动控制卡DEC4T和运动控制软件Editasc。DEC4T运动控制卡是基于PC机,专用控制3台步进电机和数字伺服电机的运动控制卡。EdiTasc不仅是MOVTEC公司各种控制卡配套的通用数控软件,它也是一个高度开放的开发平台,可以直接控制各种工业自动化设备,或方便的开发用户专用页面及控制系统。DEC4T自带36路数字输入输出口,来作为限位开关,控制CCD智能相机和起动检测仪器。

c语言相关文章:c语言教程
伺服电机相关文章:伺服电机工作原理
评论