基于 PCI总线的并联机床运动控制卡设计

引言
并联机床( P a r a l l e l Ma c h i n e T o o 1 )又称虚拟轴机床 ( Vi r t u a l Ax i s Ma c h i n e To o 1 ) 或并 联运 动学 机器,是基于并联机构的新型数控加工设备,实质上是机器人技术、机床结构技术、数控技术等相结合的物,它同时兼顾 了机床和机器人的诸多特性 , 既可以看作是机器人化 的机床, 又可以看作是机床化的机器人 。它能够提供机器人 的灵活与柔性,又具有机床 的刚度和精度,是集多种功能于一体的新型机电设备。
并联机床的结构
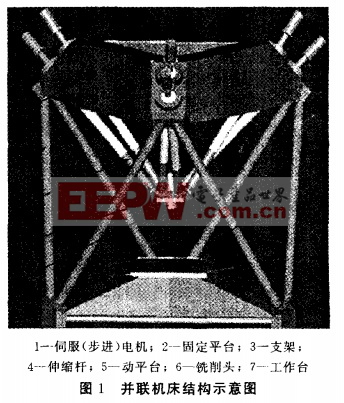
并联机床结构示意图见图 1 ,它由伺服( 步进) 电机 1 、固定平 台 2 、支架 3 、伸缩杆 4 、动平台 5 、铣削头 6 、工作台 7等组成。安装在固定平台和动平台之间的伸缩杆由伺服电机( 或步进电机) 驱动,带动伸缩杆内的滚珠丝杠和螺母运动 , 使伸缩杆的长度发生变化。由于各伸缩杆( 一般为 6 杆或3杆) 的长度发生变化, 使得动平台的位姿发生变化 ,多个伸缩杆共 同运动 ,驱动动平台实现上升、下降、翻转等运动,带动铣削头实现工作所需的各种运动 。各伸缩杆采用相互独立的伺服驱动装置驱动 。
开放式的控制系统结构
对于并联运动机床来说 ,其最大特点就是机械结构非常简单 ,而控制却异常复杂。并联运动机床的控制系统必须采用开放式结构。目前 ,国内外的开放式数控系统主要有如下 3种结构形式 。
1 专 用 CNC十P C 型即在传统的非开放式的专用数控 系统中嵌入机,使得整个系统可以共享一些计算机软硬件资源 。
部分完成系统管理等非实时控制任务 ,实现辅助编程、分析、监控和编排工艺等功能; C NC部分负责完成插补计算 、伺服控制以及 I / O控制等一些实时控制任务。这种结构形式的数控系统其开放性只在机部分,其专业的数控部分仍处于封闭状态,不能实现 NC内核的开放 ,此类结构形式一般为主流数控系统厂商所采用。
2 P C+运动控制卡这种基于开放式运动控制卡的系统结构是以通用微机为平台,以标准插件形式的开放式运动控制卡为控制核心。 通用 PC机实现数控程序编辑 、 人机界面管理、外部通信等功能,运动控制卡负责机床的运动控制和逻辑控制。 它支持用户的二次开发和自主扩展, 既具有 P C机的开放性 , 又具有专用数控模块的开放性 ,可以说它具有上、下两级的开放性。
3 纯 P C型即全软 件形式 的 P C机数控 系统 ,该 系统 是指的全部功能均 由 P C机进行处理 , 并通过装在扩展槽中的伺服接口卡对伺服驱动等进行控制。其软件的通用性好 ,编程处理灵活 ,但存在着操作系统的实时性、标准统一性以及系统稳定性等问题。目前这类系统正处于探索阶段,还尚未形成产品,但它代表了数控系统的发展方向。
如果着眼于经济型数控并联机床控制系统的设计, 选择P C+运动控制卡的开放式数控系统是当前最为理想的。以P C机和运动控制卡为控制系统核心, 直接将系统平台构筑于 P C机的软硬件基础之上 ,驱动元件为步进电机 ,系统在 Wi n d o ws环境下用 VC + + 语言实现 ,软件的设计采用面向对象的方法。
基于 P CI总线的并联机床运动控制卡设计并联机床运动控制卡通过控制机床各个驱动杆实现主轴的运动,控制轴数较多,同时还要得到所要求的刀具运动轨迹。要实现刀具的高速、高精度轨迹控制 , 运动控制卡和 P C机存在着大量的数据交互, 传统的方式是采用 I S A总线进行,由于 I S A总线带宽限制 , 数据传输速度慢 , 使 P C机在数据传输方面花费的时间较多,从而在其它方面的处理时间相对缩小 。本系统实现运动控制卡与P C机通信,能够达到很高的数据传输速率 , 使 P C机的处理能力大大增强 , 从而保证 了数 控 系统 的实 时性,并 且使 开发 相应 的基 于平 台的数控软件更容易, 和配套的其它软件的接 口更方便。
控制系统硬件组成图见图 2 。该系统采用的是公 司的 3 2位定点 DS P芯片 T MS 3 2 0 VC3 3 。 D S P芯片负责接受 P C I 局部总线的命令和参数,然后通过运动控制算法完成对步进电机的精确运动控制,同时芯片还负责将反馈信息传输给 P C I 局部总线,并且控制系统外围 i / o模块。D S P与 P C机的通信通过桥接芯片 C Y7 C 0 9 4 4 9 P V实现_ 1 J 。

伺服电机相关文章:伺服电机工作原理









评论