ADS环境下基于S3C2410串口应用程序的开发

0 引言
ARM ADS全称为ARM Developer suite(ARM开发套件)。是ARM公司推出的ARM系列处理器集成开发工具,使用非常广泛,目前最高版本的是1.2,它取代了早期的ADS1.1和 ADS1.0。它除了可以安装在Windows NT4、Windows98和Windows95操作系统下,还支持Windows XP和Windows Me操作系统。ADS由命令行开发工具、ARM实时库、GuI开发环境(CodeWarrior和AXD)、实用程序和支持软件组成。有了这些部件,用户就可以为ARM系列的RISC处理器编写和调试自己的开发应用程序了。命令行开发工具完成将源代码编译,连接成可执行代码的功能,包手舌:armcc、 armcpp、tcc、tcpp、armasm、armlink、armsd。其中armcc用于将ANSI C编写的程序编译成32位的ARM指令代码。支持编译C和C++代码的运行时库有:ANSI C库函数、C++库函数。ADS的CodeWarrior集成开发环境(IDE)是基于Metrowerks CodeWarrior IDE4.2版本的,经过适当的裁剪以支持ADS工具链,为管理和开发项目提供了简单多样化的图形用户界面,用户可以使用ADS的CodeWarrior IDE为ARM和Thumb处理器开发用C、C++或ARM汇编语言的程序代码,缩短了用户开发项目代码的周期。ADS中包括3个调试器:AXD(ARM ExtendedDebugger)、ARMSD(ARM Symbo l i c Debugger)、ADW/ADU(Appl icat ion Debugger Windows/Unix)。在软件开发的最初阶段,可以使用调试器进行仿真来测试所开发的软件是否达到了预期的效果。
在数据采集的实际开发应用中,串口通信是不可缺少的部分,它是目前嵌入式系统与PC机间的一种非常重要且普遍使用的通信方式。计算机利用串口对单片机等外部设备的控制减少了在访问外部设备时需要进行复杂的汇编语言编程等带来的麻烦,同时也有利于大规模的开发和设计。在Linux系统中,系统把串口等其它外设当作文件进行操作,在端口的读写上非常方便,大大提高了系统编程效率。本文通过把Linux系统移植到S3C2410后,利用S3C2410自带的串口对目标实现控制,详细地介绍了串行通信的硬件电路和软件的实现方法。
1 硬件结构
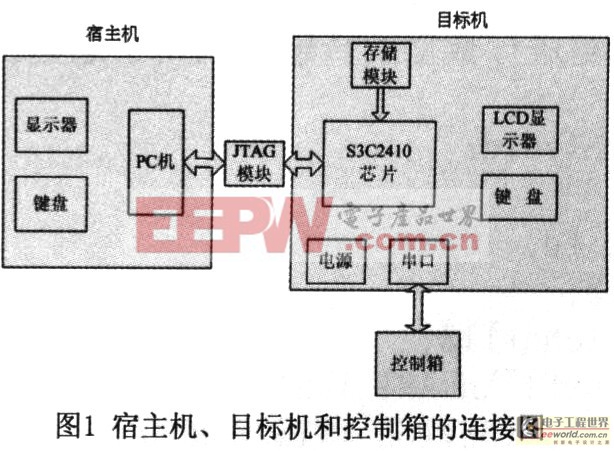
目前串口大部分是在Windows或是在Dos下运用,本文是在Linux系统下利用串口来实现通信的。S3C2410芯片是三星公司生产的 16/32bit的RISC处理器,独立的16kB指令和16 kB数据的缓存(cache),用于虚拟内存管理的MMU单元,LCD控制器(STNTFT),非线性(NAND)FLASH的引导单元,系统管理器(包括片选逻辑控制和SDRAM控制器),3个通道的异步串口(UART),每个控制器支持的最高波特率可以达到230400 Boud/s,这些特点为实现在Linux系统下计算机与开发板之间顺利进行串口通信提供了可靠的保证。WNSC400是北京维纳光科公司生产的电动位移平台控制箱,它拥有RS232的串口能使S3C2410通过串口对其进行数据通信,从而能够实现S3C2410对电动位移平台的控制。但是控制箱是在 Windows环境下实现的,所以要想把它应用到嵌入式系统中是存在难度的。S3C2410的串口要实现与控制箱的数据传输,那么就要使控制箱及其控制的电动平移台实现与其它模块组成嵌入式系统,比如与一台摄像头联系起来,当摄像头对物体进行图像采集后,对采集数据进行处理,进而计算出目标具体要改变的位移等参量,然后控制箱在通过$3C24lO的存储器中读取这些数据,并发出命令使电动位移平台按需要的改变量进行移动,这样就是实现了一个简单的嵌入式系统。计算机(宿主机)、目标机(S3C2410)还有控制箱之间连接的硬件原理如图1所示。在宿主机上将在ADS环境下编好的程序通过JTAG下载到 S3C2410后,S3C2410就可以通过串口与控制箱进行通信。
2 UART软件部分的实现
绝大多数的Linux软件开发都是以native方式进行的,即本机(HOST)开发、调试、本机运行的方式,但是由于在目标机上没有足够的资源来满足嵌入式系统的开发,所以这种方式不适合于嵌入式系统的软件开发。通常嵌入式系统软件开发采用交叉编译调试的方法。交叉编译的主要特征是某机器中执行的程序代码不是由本机编译生成,而是由另外一台机器编译生成。
串口通信的基本任务有:实现数据格式化、进行串/并转换、控制数据传输速率、进行错误检测和进行TTl与EIA电平转换。串口通信分为同步通信和异步通信两种类型,本文将用到异步串行I/0。
由于Linux系统将所有的设备都看成文件,所以访问串口时,认为串口是一个文件,我们可以使用文件系统控制函数实现基本的串口操作,比如open()函数用来打开串口,read()和write()函数用来读写串口,在传输数据完成后可以用close()函数关闭串口。
2.1 串口的基本设置
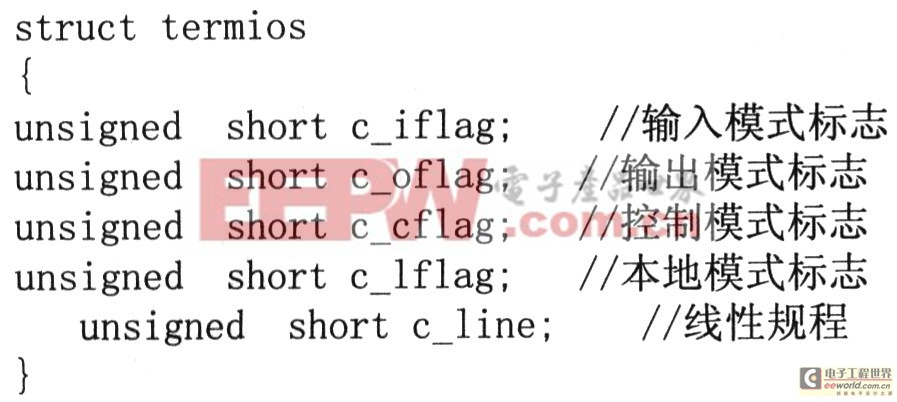
串口最基本的设置有波特率设置、检验位和停止位的设置。串口的设置主要是设置struct termios结构体的各成员值:
2.2 串口的读写
发送数据
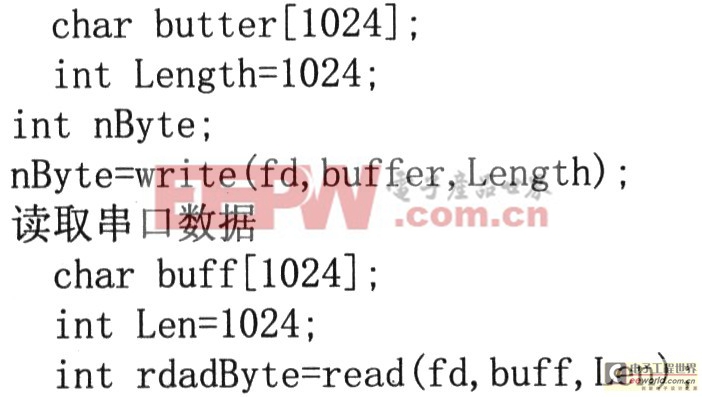
除了上面用read来读取串口的方法外,也可以使用操作文件的函数来实现异步读取,如fcnt1,或者selectt等。
2.3 应用程序
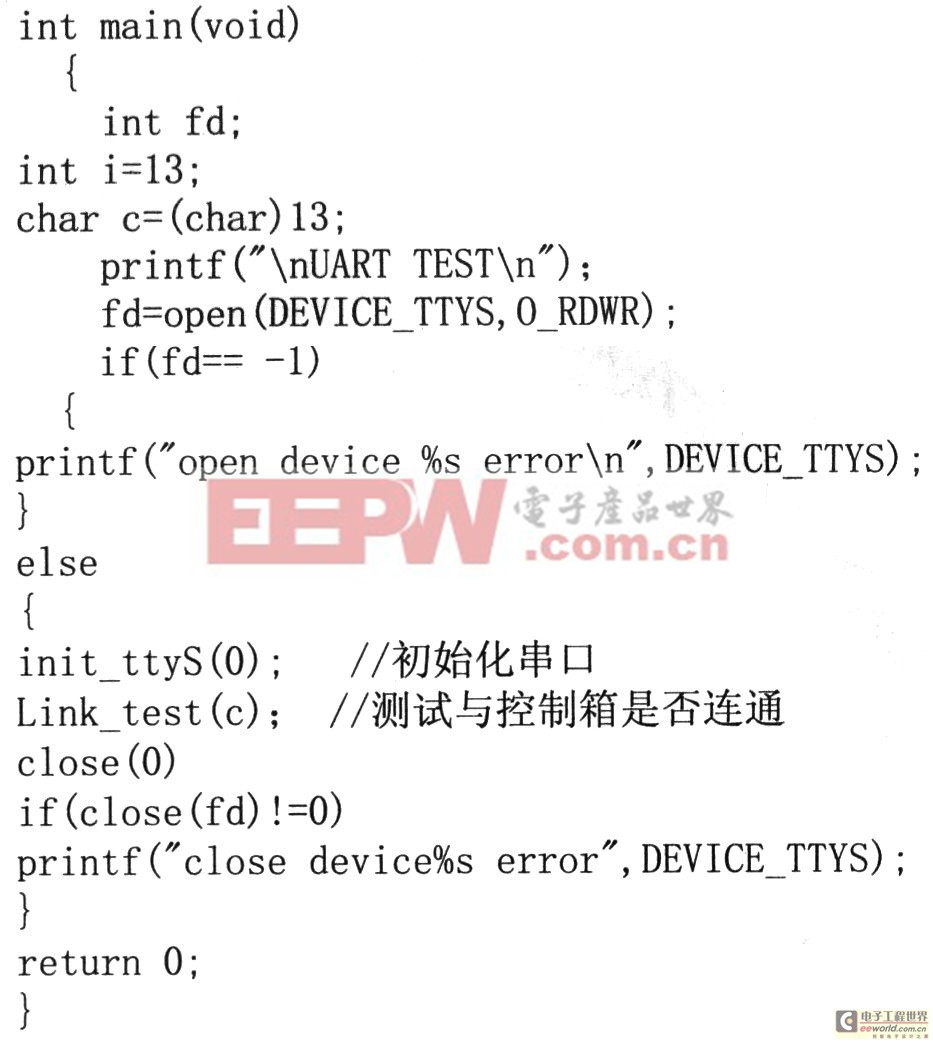
ADS开发平台的优点是它已经把串口的相关设置函数都已经包含在相关的头文件中,这样当开发人员想利用串口进行再次研发时就可以直接利用这些函数,或者在原函数上进行修改。本文中要通过S3C2410的串口对WNSC400控制箱进行数据的传输就利用了这些优点,部分程序如下:
3 结语
通过实验,实现了用S3C2410控制WNSC400控制箱来控制电动平移台,在ADS环境下进行的开发减少了直接在Linux系统下进行串口开发所遇到的麻烦,而且由于AARM具有多功能模块扩展功能,可以使多种功能集中起来,为WNSC400控制箱及其电动平移台广泛应用于嵌入式系统中创造了条件。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)









评论