基于FPGA技术的全方位移动机器人运动控制系统的方案设计

0 引言
目前,全方位移动机器人由于具有出色的灵活性,已经成为RoboCup中型组足球机器人比赛中最理想的选择。而机器人的运动控制一直以来都是直接影响机器人性能的主要因素,也是移动机器人研究的热点之一。本文研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
1 全方位移动机器人运动模型
设世界坐标系下机器人的速度为ε=[vx,vy,φ],则当vx=O,vy≠0,φ=O时,机器人做前后方向的直线运动,当vx≠0,vy=0,φ=0时,机器人做左右方向的直线运动,当vx=0,vy=0,φ≠0时,机器人做自转运动。图1中,ω1,ω2,ω3为3个主动轮的转动角速度,R为全向轮半径;L1,L2,L3为机器人车体中心到3组全向轮中心的水平距离,设有L1=L2=L3=L。α为前两轮之间的夹角,另外2个夹角均为180°-α/2。则机器人坐标系下的速度到三轮速度之间的关系如下:
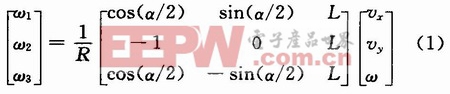

由式(1)可以看到:知道了机器人在平面世界坐标系中的速度要求后,便可以得到主动轮的速度要求,进而对电机发出相应的控制信号。
2运动控制方案本系统总体设计思路如图2所示,首先通过RS 232接口,实现PC机与底层控制芯片FPGA的通信,FPGA在接收到相关的机器人坐标系下的速度后,将机器人坐标系下的速度值转化成机器人3个全向轮子的角速度,将得到的角速度值计算出相应的占空比,生成相应占空比的PWM波形,输出信号接到直流伺服电机驱动器,然后通过FPGA采集正交编码盘信号,计算出轮子实际的角速度值,做PID速度闭环控制。鉴于FPGA模块复制的优势,这里对每个全向轮分别做了PID闭环控制。
3 系统硬件设计
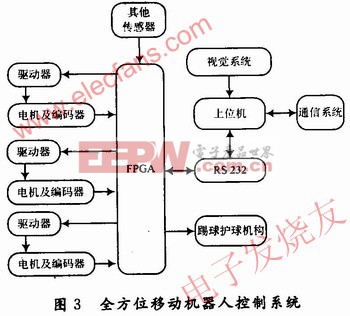
采用的三轮全方位移动机器人系统框图如图3所示,上位机主要完成图像信息的采集、处理、路径规划,并实现与场外裁判盒的通信。下位机主要是FPGA,主要实现三轮编码信号的采集,PID速度闭环控制,踢球控制,电机控制信号的产生,还有其他的传感器信息的采集等,并负责与上位机之间的信息交互。本设计只是完成了下位机运动控制部分。
3.1 正交编码信号采集与测速实现
增量式光

pid控制相关文章:pid控制原理
fpga相关文章:fpga是什么
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理




评论