基于FPGA技术的全方位移动机器人运动控制系统的方案设计
三轮全方位移动机器人与双轮差速不同,具有很大的灵活性,况且由于3个全向轮的负载的不同,使得机器人不能走出精确的直线。而要实现机器人的精确控制,一个前提就是让它能够走出很直的直线。为检验机器人控制性能,设计了如下实验:机器人以固定速度分别向前后左右4个方向行走,先观察没有加入PID控制算法时的情况,然后再观察加入PID控制算法时的情况。实验的结果如表1所示。
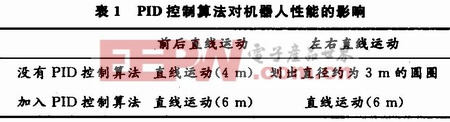
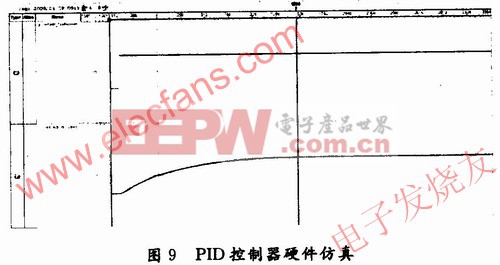
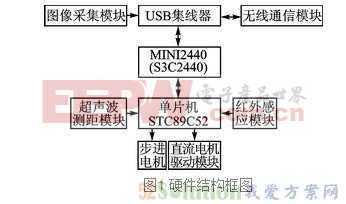
分析:由于机器人的3个全向轮所承受的负载不一样,即在相同的占空比的PWM下,3个轮子的实际速度并不相同,这就使得三轮速度不可能准确合成机器人的速度,进而影响机器人的控制轨迹。根据图1所示的机器人1号轮和3号轮负载相当,2号轮子承受的负载较大,没有加入PID控制器时,前后运动虽然在一定范围内近似直线,但是机器人运行的速度达不到预期设定的速度,左右运动轨迹就是一个圆,而且设定的机器人左右移动速度大小还决定了机器人是朝顺时针方向还是逆时针方向转圈。加入PID控制算法后,轮子的速度得到校正,机器人能够以预期设定的速度前后左右运动,特别是左右运动在一定范围内近似为直线,不再是圆圈。可见PID闭环控制算法明显提高了机器人的控制性能。
5 结语
针对目前常见的以DSP为核心实现足球机器人底层运动控制系统的方案,提出了一种采用FPGA实现三轮全方位移动足球机器人的底层运动控制系统的方法。通过在三轮足球机器人上的应用实践,发现这种采用FPGA实现的方案有很好的实时性,精确度较高,而且由于FPGA本身的引脚多特点,其可扩展性较强,比如可以通过串口配置数字罗盘等外围信息传感器等其他传感器,同时,本设计对于研究多电机的机器人运动控制系统的实现方案有重要的参考价值和实用价值。
另外,由于全向轮的随动性较强,且易打滑,在实行精确控制的时候方向容易受到影响,而且PID闭环控制算法反应时间较长,参数还需要更多时间的调试,在以后的研究中,我们将研究更为精确的控制算法,实现对机器人的精确控制。

pid控制相关文章:pid控制原理
fpga相关文章:fpga是什么
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理







评论