机电一体化的智能皮影表演系统*
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
*项目来源于国家级省级大学生创新创业训练计划项目支持(项目编号:S201910701058),并获邀在2019年西安大学生创客节展出。
本文引用地址:https://www.eepw.com.cn/article/202204/433244.htm作者简介:**通信作者:王新怀,男,博士,副教授/博导,研究方向:微波毫米波电路与系统设计、智能天线与天线组阵技术等领域。
邮箱:xinhuaiwang@xidian.edu.cn。
徐茵,女,讲师,研究方向:微波毫米波电路与系统设计、实时信号处理系统设计等领域。
崔鑫,段清原,范浩扬,电子工程学院电子信息工程专业。
王泽远,微电子学院微电子科学与工程专业。
0 引言
皮影戏是我国非物质文化遗产,但因为传统皮影表演需要长期的专业训练,并且皮影文化在现代的流传程度严重不足,所以皮影表演已经接近销声匿迹。笔者在陕西华县等地考察发现,皮影表演依旧受到欢迎,但其表演形式较为单一,在数量和效率方面有着一定的局限性。
本系统将皮影戏和自动控制技术结合起来,赋予其新的表演形式。用机器人表演皮影戏,可以克服传统皮影戏编排效率的问题,也能突破数量局限,更大范围的发扬和传承皮影戏。
1 系统设计
1.1 系统组成部分
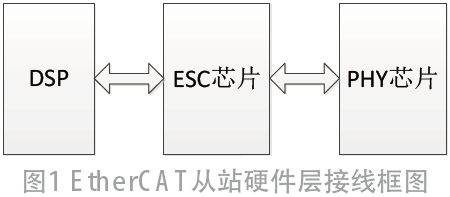
本系统整体可分为4 部分: 第1 部分负责机器人控制,包括以ESP32为核心的舵机控制系统、以74LVC4245等芯片组成的电压控制系统和以超声波测距模块为核心的定位系统;第2部分是通信系统,其实现基于UDP和MQTT互联网传输协议的上位机信息传送和Wi-Fi模块信息接收的功能;第3部分为机械结构,包括机器人结构,表演台搭建和3D打印的连接件。第4部分是皮影表演的辅助设备,包括可遥控幕布,音响、灯光系统和GUI交互界面等。
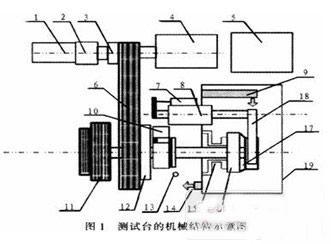
通过利用MQTT等互联网传输协议快捷有效地解决了上位机和主控芯片的通信问题;应用3D打印形成机器人和皮影、以及机器人和轨道的各种连接传动装置;完善的机器人自由度设计可以完美的实现传统皮影表演的各种动作。通过各个功能的有机结合,最终实现了机电一体化的智能皮影表演系统,可借助上位机实现对系统的完全控制。系统组成结构如图1所示。
1.2 系统工作过程
上位机通过互联网传输协议发送编码后的舵机转动角度信息给主控芯片。主控芯片解码后,I/O端口输出信号通过74LVC4245芯片转化为PWM驱动信号控制机器人舵机的转动角度。其中,上位机中的角度信息会按照不同节目打包,通过发送具体的信息包来表演不同的节目;超声波测距模块控制机器人的绝对位置;上位机GUI交互界面控制遥控幕布,灯光系统,音乐系统等辅助设备,最终实现机器人皮影表演。

图1 系统框架图
2 系统功能实现
2.1 硬件部分
2.1.1 机器人主控
主要采用ESP32芯片作为的主控芯片,ESP32芯片具备2.4 GHz Wi-Fi功能,可作为独立系统运行应用程序,其多达16路的硬件PWM输出正好能够满足皮影机器人的舵机驱动需求。在工程中我们使用基于ESP32芯片设计的ESP32-WROOM模组,只需添加很少的外围电路就能实现开发板的设计。同时ESP32具备Wi-Fi功能,因此可实现AP与SAT联网模式,而且也支持MQTT等互联网传输协议,可实现ESP32SAT模式接入局域网、并与电脑主机实现MQTT协议的通讯。随后,ESP32将通过局域网接收到的包含动作序列的数据转化为机器人的状态信息,并及时将机器人的工作状态等信息回传到上位机。
2.1.2 电压控制组
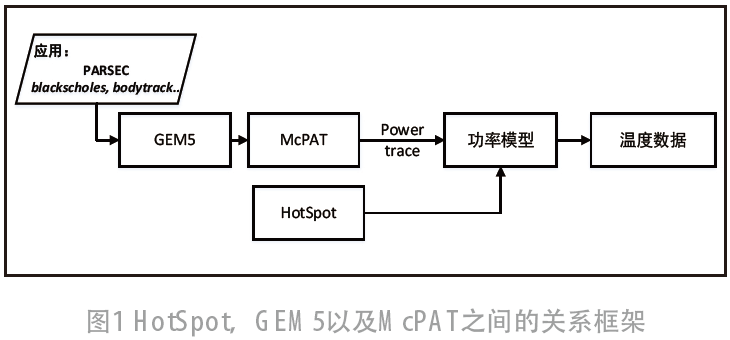
电压控制组以降压与电平转换为主要方案。采用12V锂电池供电,经XL4016模组降压到6 V左右达到舵机的驱动电压,保证舵机正常运转;再经过LM2940芯片稳压至5.0 V给电平转换芯片和超声波测距模块等电路供电;最后采用74LVC4245芯片将3.3 V的ESP32的I/O端口输出信号转换为5.0 V的PWM驱动信号,控制舵机转动速度和具体角度,达到表演效果。电平转换示意图如图2。

图2 电平转换示意图
2.1.3 定位系统
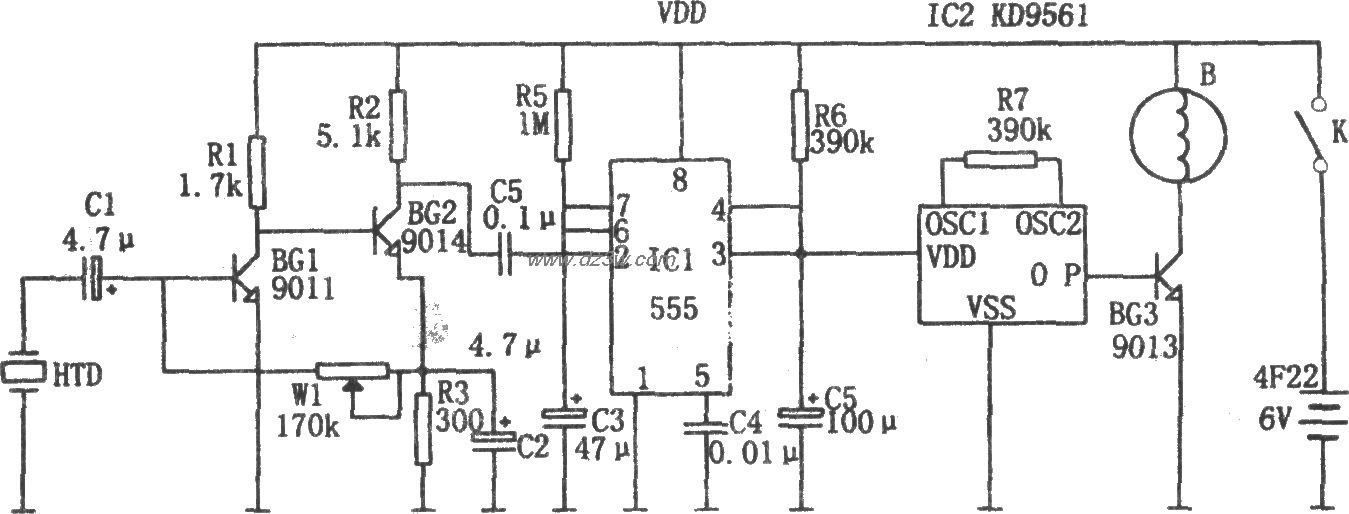
采用HC-SR04超声波测距模块进行机器人在轨道上的定位(图3)。使用ESP32给予模块高电平信号启动,模块发送方波用于距离检测,应用方波的发射和返回的时间差,配合计算公式可计算大概距离,再通过限幅加权平均滤波算法进行数据处理,就可以得到机器人在轨道上的精确位置。最终误差会在1 cm之内。

图3 定位系统示意图
2.2.4 辅助设备
采用电磁继电器控制大功率灯珠,可以让上位机控制灯光的状态,同时加上手动开关,实现自动和手动两种控制。采用AOD4184功率NMOS管模块对灯条进行控制,通过上位机可根据剧情调节灯光的亮度,也可实现呼吸灯效果。
2.2 软件部分
2.2.1 服务器搭建
上位机与机器人主控板之间借助MQTT传输协议进行通信,MQTT是基于客户端-服务器的消息发布/订阅传输协议,具有轻量、开放、稳定的特点,可以实现一对多的消息发布。采用EMQX搭建MQTT的服务器,EMQX是物联网MQTT协议服务器,可以支持物联网数据的大并发数据收发。
2.2.2 上位机通信
上位机采用Python进行编程,搭建客户端,实现与服务器的无线通信,进行动作序列和演出统筹等信息的传输。应用socket标准库建立UDP连接,应用paho-mqtt库实现MQTT的订阅端和发布端。使用约定的端口号接收UDP广播,获取遥控器所发送的指令和MQTT传输协议所需要的主题信息。编写滤波算法对遥控器指令进行处理,根据得到的不同指令调用开场、表演、谢幕等不同的函数。使用threading模块实现多线程,可以同时处理多个任务。另外,利用线程threading库中Event对象的wait方法实现阻塞效果,可以很好地实现整体程序的暂停、恢复、停止。
2.2.3 GUI界面
GUI交互界面的设计,成功实现人机交互。采用Tkinter 标准库进行GUI 的开发,便于应用多种控件,采用place及pack等方式进行布局管理。界面操作选项多样,包含播放、暂停、停止、音量大小、灯光亮度等选项。使用GUI交互界面,可以实现对表演系统的统一控制。
2.3 机械结构
2.3.1 表演台系统
表演戏台是按照传统戏台样式进行设计的,采用木制雕镂结构,配以吊坠进行装饰,即含古风古韵,又轻巧便捷。内部支撑结构采用铝合金框架进行搭建,整体质量较轻,拆卸组装十分简单,便于运输。灯光采用的是220V供电的LED灯设备。具体为额定功率15W的灯珠对两个皮影进行投影,和灯珠排布密集的灯条,用于照亮背景景物。幕布采用全自动化的设计,可通过上位机控制实现自动开合,按照遥控系统的控制呈现开场、谢幕等效果。音响采用双声道立体声扬声器,可以通过上位机控制具体节目的音乐播放。机器人轨道采用小摩擦力轻轨轨道,减轻轴承负担,提高使用寿命。
2.3.2 机器人设计
借鉴传统的皮影表演,设计了三根控制皮影的表演杆,然后根据每根杆可能需要转动到的角度,在设计机器人时,分配给手臂4个自由度,头部2个自由度,保证机器人可以完美、精确地实现传统皮影动作。
2.3.3 3D打印
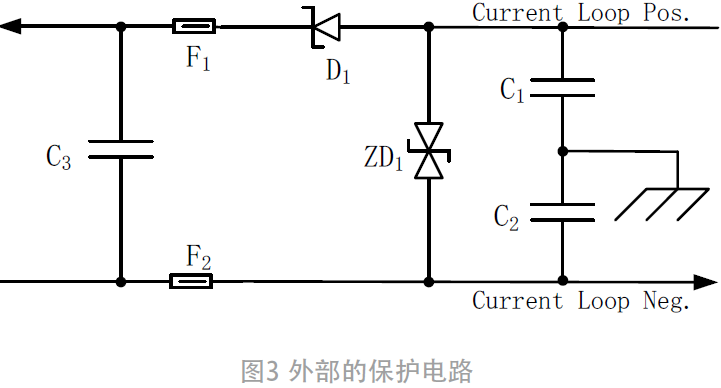
应用3D打印形成机器人与皮影的连接件和机器人与轨道的传动轴承,保证机器人的运动能力和皮影与机器人动作的协调性。同时,设计固定底板把主控板电路与电压控制组隐藏于密闭空间中,提高系统稳定性,体现工程美学。系统如图4所示。

图4 实现的系统整机
3 结论
本皮影表演系统具有机电一体化和轻便可拆卸等特点,其硬件与软件各部分都已经过实际测试且正常运行。机器人与皮影的结合表演,具有一定的文化创意,符合弘扬文化自信的潮流和智能化的技术发展趋势。
参考文献:
[1] HETLAND M L.Python基础教程[M].人民邮电出版社,2018.
[2] 董付国.Python程序设计基础[M].清华大学出版社,2016.
[3] 李颖卓,梅志辉.基于STM32单片机皮影戏机器人的设计与实现[J].信息技术与信息化,2015(09):179-180.
[4] 蔡睿妍.基于Arduino的超声波测距系统设计[J].计算机产品与流通,2020(06):170.
[5] 董彧先.基于Python的网络编程研究与分析[J].科学技术创新,2019(20):85-86.
(本文来源于《电子产品世界》杂志2020年9月期)

评论