变频器内置PID功能及应用

0 引言
本文引用地址:https://www.eepw.com.cn/article/201808/387683.htmKV2000 无感矢量变频器在各行业的应用越来越多,用户经常会用到PID功能。虽然使用说明书中对PID功能已经有详细的描述和说明,但由于技术人员对KV2000独特的PID 功能,诸如系统的组成、功能选择、方向确定、设定值定义、正/ 反作用及PID参数的调整等的理解有所不同,以及各行业的自动控制系统被控对象的千差万别,导致PID的参数也必须随之变化,以满足系统的性能要求,加之一些新用户对PID功能不熟悉,这都会给使用带来相当大的麻烦。
作者依据十多年从事以变频器为主的自动化控制设计、应用经验,详细介绍了KV2000 无感矢量变频器内置PID 的丰富功能,PID 控制的系统组成、参数调试及运行的要点。算是对产品使用手册的补充,以便广大用户能在较短时间内理解并简便地完成该功能的调试。
1 KV2000无感矢量变频器PID控制器介绍
PID控制器有多种形式,而在实用上多数仍采用比例- 积分-微分(PID)控制器,尤其在温度、压力、流量值控制上应用最为广泛。
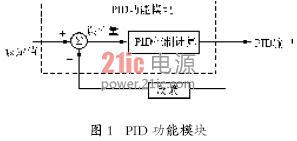
PID控制属于闭环控制(Closed-loop Control System),是调整反馈量与给定量保持一致的常用的过程控制方法,主要目的是在闭环控制回路中提供系统误差量维持最小以及系统反应速度适当,避免过激振荡或过度迟钝现象的可能。如图1所示,变频器内置的PID控制器通过控制对象的传感器等检测到物理量(如压力,温度等)即反馈量,将其与系统给定量进行比较。如有偏差,则通过PID调节的作用使偏差为零。
1.1 PID主要控制参数
现将PID控制器中主要使用的控制参数做逐项介绍并说明其用法。
1.1.1 F073 PID设定来源与反馈来源的选择
从图1得知,在控制系统中,必须要有设定值(目标值),PID 功能模块才会计算反馈值与设定值之间的误差量,然后产生PID 的输出结果给控制系统。
F073 就是用来设定PID 功能模块所需要的设定值的来源和反馈值的来源,其数值结构由小数点左边的整数部分和小数点右边的小数部分组成。
1)整数部分用来定义PID 控制所需设定值(目标值)的来源;
2)小数部分用来定义PID 控制所需反馈值的来源。
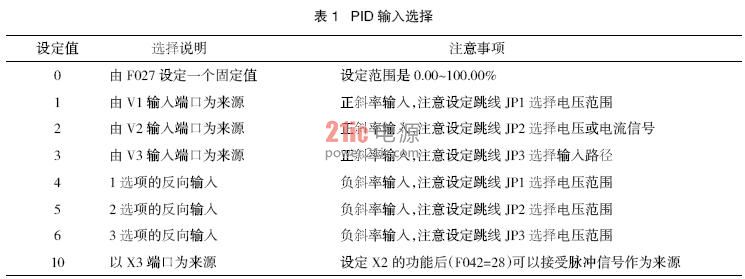
表1列出可供选择的来源设定方式,除了第10号功能选项只能用于设定值来源的设定,其余的选项都是用于设定值以及反馈值来源的选用。
1.1.2 以下说明重要的注意事项
1)选择1、2、3 的设定,表示设定值或反馈值的来源是模拟信号,并且信号是正向的。所谓的正向信号源是指信号电位越高,代表设定值越高,是正斜率的输入信号源。即当输入在0~+5 V(或0~+10 V或0~20 mA)间变化时,代表设定值或反馈值在0~100%变化。
2)选择4、5、6的设定,与1、2、3 类似,只是输入信号是负向的,意指信号电位越高,代表设定值或反馈值越低,是负斜率输入信号源。即当输入在0~+5 V(或0~+10 V或0~20 mA)间变化时,代表设定值或反馈值在100%~0变化。
1.2 PID 控制功能的比例、积分、微分增益参数说明
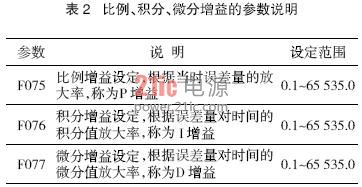
在PID控制中有三个很重要的控制参数,即比例、积分、微分增益,其说明如表2所列,这三个参数用来调整PID控制模块的响应时间,对于系统整体运作呈现出来的反应速度、稳定性和最终追求的精确度有很大的影响。关于三个增益的作用和设定在《变频技术应用》2007(3)中刊登的《中央空调智能控制系统》一文中有详述,在此不再赘述。
2 如何调整最佳的PID增益
参考图2,若将I 和D 的增益设成最小值(最小仅能为0.1),那么将可以看成只有P 增益了,因为此时I和D增益影响不大。

在只有P增益的情况下,就可以很容易地尝试设定P增益的值,此时系统直接输出对于P增益的反应。当决定了P增益后,下一步就是设定I增益了,I增益的设定原则是让系统能够补充P增益无法修正的的部分即可,若要让系统反应更快一些,那么就要增加I增益的值,以增加积分累计来提升反应速度;
但是要注意别太大了从而造成过度修正的现象。
一般而言,在有回馈的控制系统中,仅设P和I的增益就足以完成控制的需求了,并不特别需要D增益部分;D 增益的目的是为了让系统在时间响应上有更好的结果。设定D增益的值时,要仔细观察系统的反应动作,它的作用是在误差的值发生变化的时候,才会有最好的效果,而且它还包括了误差量变化的方向性,所以,D 增益是一个有方向性的向量值。总之,是一个很好的加速、刹车的角色,因此,只要观察系统的变化,由输出效果就能设定出一个适当的值。
3 其他重要的基本控制项目
要让PID顺利启动,除了要了解F073的定义和PID 增益参数之外,还必须了解以下几个参数,并按照要求设定后才可顺利执行PID的控制功能。
3.1 PID的启动控制
首先,必须选定一个数字输入端口作为PID 启动信号的输入口,在被选定的数字端口的对应功能选择参数位置处输入50。例如,选定X1作为PID启动输入口,那么就必须设定F041=50。当设定好后,X1 若有信号动作时,PID功能就被启动,若X1 的信号停止,那么PID功能就停止。
3.2 PID的输出方式
当了解处理PID的增益和启动方式后,接下来就是PID的输出了。PID的输出方式有两种:一是直接用作变频器的速度指令,二是直接用作模拟输出端口(AM端口)的输出量。两种方式的设定方法见表3。












评论