无速度传感器矢量控制变频系统研究

0 引言
本文引用地址:https://www.eepw.com.cn/article/201808/387554.htm矢量控制也称磁场定向控制。它是上世纪70年代初由德国西门子公司F. Blaschke等人首先提出,以直流电动机和交流电动机比较的方法分析阐述了这一原理。作为异步电机控制的一种方式,矢量控制技术已成为高性能变频调速系统的首选方案。随着计算机技术飞速发展,功能强大的数字信号处理器(DSP)的广泛应用使得矢量控制逐渐走向了实用化。
在高性能的异步电机矢量控制系统中,转速的闭环控制环节一般是必不可少的。通常,采用光电码盘等速度传感器来进行转速检测,并反馈转速信号。
但是,由于速度传感器的安装给系统带来一些缺陷使得系统的成本大大增加;精度越高的码盘价格也越贵;码盘在电机轴上的安装存在同心度的问题,安装不当将影响测速的精度;使电机轴的体积增大,而且给电机的维护带来一定困难,在恶劣的环境下,码盘工作的精度易受环境的影响。因此,越来越多的学者将眼光投向无速度传感器控制系统的研究。
1 转子磁场定向无速度传感器矢量控制原理
1.1 系统矢量控制原理
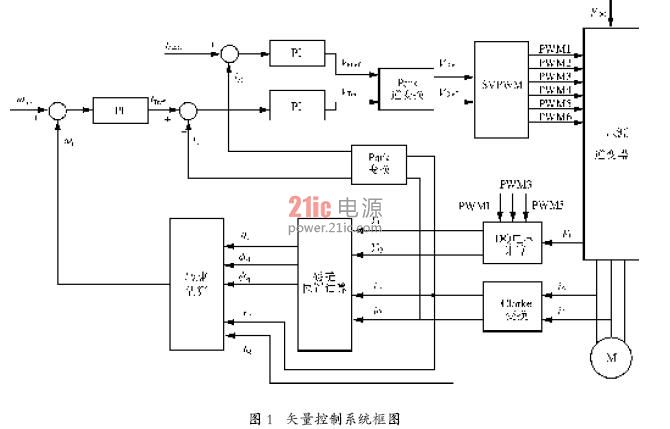
所谓无速度传感器控制系统就是取消了传统的交流电机调速系统中的速度检测装置,通过检测定子的电压电流来间接估算电机运行的实际转速值,将该值作为转速反馈信号。本系统采用电流与电压相结合的转子磁链估算模型以及基于异步电机数学模型的速度估算方法,可得转子磁通位置角,并送至旋转变换环节。用霍尔电流传感器检测三相输出的两相电流iA、iB,计算出第三相电流iC=-(iA+iB),从而获得实时的输出电流信号,亦为电机上的电流信号,为矢量控制的计算提供实时信号。由测得的电流经矢量变换得到转矩电流分量iT和励磁电流分量iM,利用iMref-iM、iTref-iT所产生的电流误差经PI 控制器产生VMref、VTref ,经旋转变换后求出两相输出电压VDref、VQref,进而控制逆变器。图1是其矢量控制系统框图。
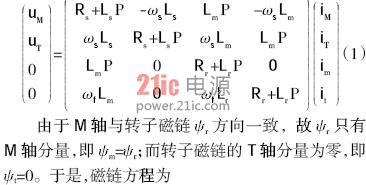
1.2 异步电机转子磁场定向基本方程
如果规定MT 坐标系的M 轴沿着转子磁链鬃r的方向,则MT 坐标系就沿转子磁场定向,此时异步电机的电压方程为

1.3 转子磁链位置的估算
在转子磁场定向的无速度传感器的异步电机控制系统中,转子磁链估算是至关重要的一环。如果转子磁链估算不准确,则转子磁场定向控制系统的优点,即实现转矩和磁通的解耦控制将无法实现。根据两相旋转坐标系下异步电机的基本方程,可以得到电流型转子磁链估算模型。
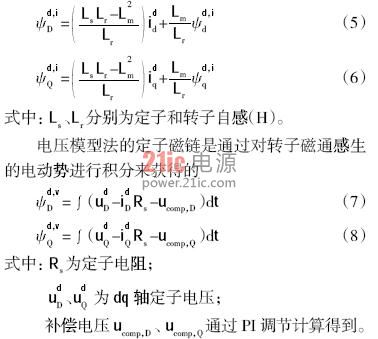
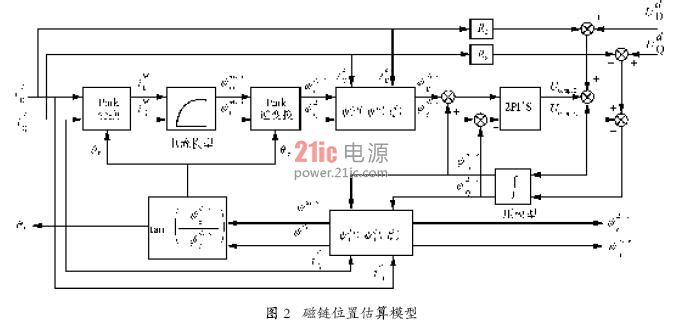
在低频时,式(7)和式(8)中的定子电压值变小,定子电阻压降的偏差对积分结果的影响增大,因此必须准确检测定子电阻,但是定子电阻会随温度变化,要十分准确地检测是比较困难的。而对于电流模型来说,电动机在高速运行时,由于电机参数的偏差,容易引起磁通振荡。所以,本系统将这两种方法综合在一起,以相互弥补高频和低频的不足。其运算框图如图2所示。
1.4 转速的估算
根据两相静止坐标系下异步电机的基本方程,












评论