基于超声波测距的二维倒车雷达系统设计

摘要:针对现有一维倒车雷达系统无法探测地面路况的问题,设计了一款基于超声波测距的二维倒车雷达系统。两列超声波探头分别监测车后方水平障碍物和车后方地面障碍物,对系统的地面监测即超声波斜面测距给出了理论依据,若车后方有障碍物,则系统发出语音提示。实验测试结果表明,该系统可实现车距在水平方向3~400 cm的准确测距,同时对地面出现的障碍物与凹坑有较高辨识能力,系统可靠性高。
本文引用地址:https://www.eepw.com.cn/article/201808/386801.htm引言
近年来,随着经济的迅速发展,汽车作为便捷的交通工具已进入越来越多的家庭,同时,由泊车和倒车所引发的事故也越来越多。倒车时,车内、外的反光镜可以扩展驾驶员的视野,但是汽车后方的障碍物,以及由于高度不足,通过反光镜看不到的障碍物都可能处于驾驶员的视野死角中。据相关调查统计,15%的汽车碰撞事故都是由倒车时汽车的后视能力缺乏造成的。
本文针对一维倒车雷达系统的主要缺陷,设计了一款基于超声波测距的二维倒车雷达系统。该系统可及时辨别汽车后方凸起、悬崖以及后方处于驾驶员盲区内的其他障碍物,同时所加入的智能语音报警功能,可及时提示驾驶员车后的具体情况。
1 系统总体设计
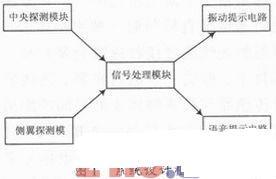
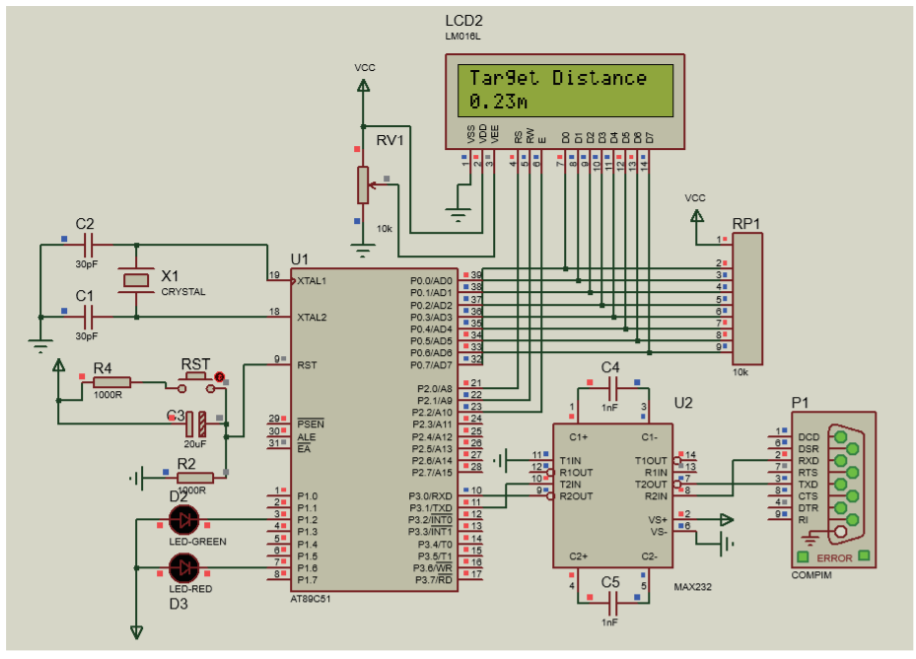
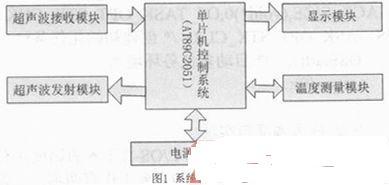
本系统主要由STC89C52单片机、超声波水平测距模块、超声波地面监测模块、稳压电源模块、温度补偿、智能语音报警模块及液晶显示电路等组成,系统总体设计原理框图如图1所示。
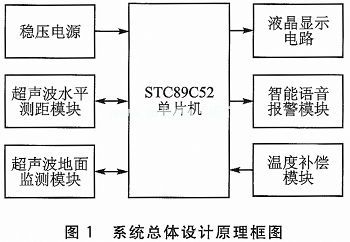
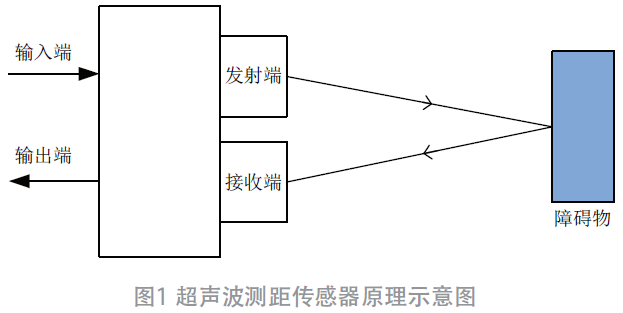
系统工作原理如下:汽车挂倒档,系统通电启动完成初始化。由于声速与温度有关,使用温度传感器测量现场温度,并送回单片机进行声速补偿。超声波水平测距模块从汽车尾部向水平方向发射超声波,超声波地面监测模块从汽车尾部方向发射超声波(安装角与水平面成60°)。超声波在空气中传播,遇到障碍物时会产生出回波,回波分别由超声波水平测距模块和超声波地面监测模块接收。回波经过前置放大、带通滤波、电压比较器后,由单片机检测回波到达的时刻,并计算超声波从发射到接收所使用的时间(即渡越时间),由此计算出车尾与障碍物的距离。距离实时显示在液晶显示屏上,并通过智能语音报警模块发出提示语音。
2 主要硬件模块设计
2.1 超声波水平测距模块设计
采用超声波收发一体测距模块HC—SR04完成测距任务,此模块包括超声波发射探头、接收探头、控制电路,能够实现3~400cm距离测量。超声波发射探头发出的超声波频率为40 kHz,波束角为30°,探测范围为轴向±30°的弧状区域。
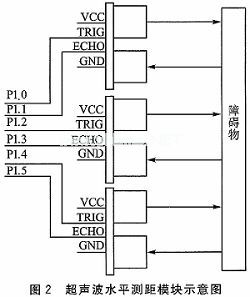
超声波水平测距时,3个超声波模块以等问距方式排列,每个超声波模块的TRIG和ECHO引脚分别与单片机I/O口相连。单片机依次给TRIG引脚一个大于10μs的高电平,这样超声波测距模块就可以给发射探头8个40 kHz的周期电平,此时发射探头发出超声波。接收探头检测到回波后,ECHO引脚输出一个与超声波从发射到接收所用时间T相同的高电平,高电平时间T通过单片机内部定时器0加以采集。当单片机采用12 MHz的外部晶振时,每执行一个机器周期则需要1μs,计数加1需要一个机器周期,所以通过定时器计算得到的时间T(单位s)为:
T=(TH0×256+TL0)×10-6 (1)
其中,T为超声波从发射到接收所用的时间,THO与TLO分别表示单片机定时器O的高字节和低字节寄存器值。探头与障碍物间的距离S为:

系统运行时,超声波水平测距电路中的3个超声波测距模块依次发出超声波,间隔至少大于60 ms,以保证超声波回波不会相互影响。超声波水平测距模块工作图,如图2所示。
2.2 超声波地面监测模块设计
超声波测距的关键是探头要接收到回波,探头发出的声波沿直线传播,遇到不同介质的界面会产生反射和散射现象。声波向斜面入射时,反射波会沿着反射角方向传播,可能并不指向探头。图3是反射波返回探头的极限情况。
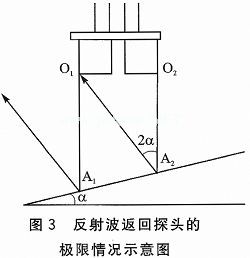
该情况下,H为可测距离,α为界面倾角,接收发射探头距离之间的关系为:
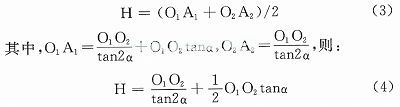
当界面倾角α为30°、O1O2为38 mm时,探头只能在H小于32.9 mm时才能接收到反射波,实际斜面测量距离远大于此距离,所以实际测量中反向散射波成为回波的主要成分。超声波测距时,对于具有一定倾斜角度的粗糙斜面,不计声传播衰减时的散射回波强度为:

其中,Is为散射回波;Wo为超声波探头发射功率;v为轴向集中系数,其与辐射面的形状有关,如为圆形辐射面,则v=π·d/λ;H为探头到斜面的垂直距离;△θ为波束角;β
为入射波倾角。
由式(5)可知:在探头发射功率、轴向集中系数以及波束角固定不变的情况下,散射回波强度与测量距离、入射波倾角有关。当β=60°时,散射回波能量较β=90°时的情况减少不多,依旧能够进行回波检测。
将3个超声波模块HC—SR04固定在系统尾部,与地面成60°夹角,在实际的汽车倒车系统中,此模块可以安装在车尾的合适处。探头安装侧视图和正视图如图4所示。


评论