基于超声波测距的二维倒车雷达系统设计
2.3 温度补偿模块设计
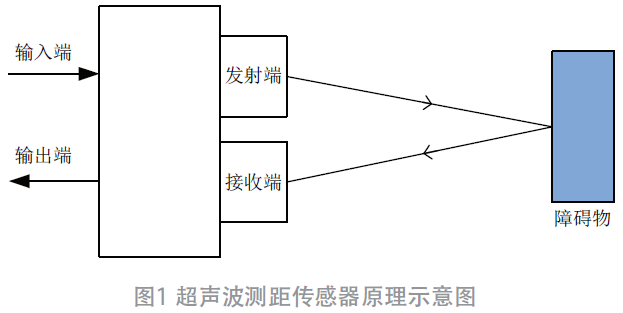
超声波在空气中以纵波方式传播,其传播速度受气体的密度、温度及气体分子成分的影响,其中温度对声速影响较大。考虑温度对声波速度影响时,声波在空气中的传输速率为:
V=331.5+0.606T (6)
其中,V为声速,T为摄氏温度。
采用美国DALLAS公司数字温度传感器DS18B20实现对环境温度测量,根据测得的温度对声速进行校正,以减小环境温度对声速的影响。DS18B20所构成的温度补偿电路具有体积小、电路简单、测量精度高等优点,只需连接到单片机的一个I/O端口就能实现与单片机之间的双向通信,测温范围为-55~125℃,在-10~85℃温度范围内的精度可达±0.5 ℃。
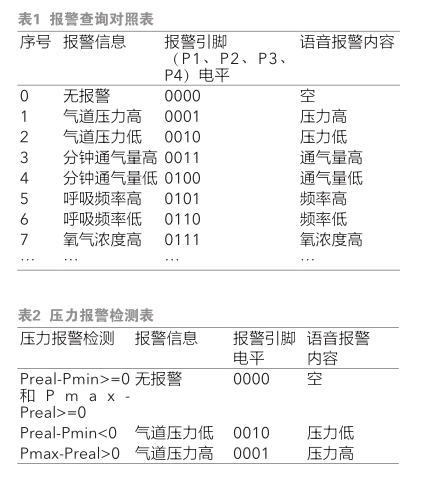
2.4 智能语音报警模块设计
采用NV020多功能语音芯片作为语音报警模块的核心元件。该芯片工作电压范围为2.7~3.6 V,内建16位D/A音频输出,自带内部滤波音频功放,可以直接驱动8 Ω/0.5 W的扬声器,具有高音质、低噪声的特点,可构成按键控制模式、一线串口连接以及三线串口连接3种工作方式。使用时,只需通过单片机寻址所存储的提示语音即可实现调用播放,发送不同命令码可实现音量调节、语音播放、暂停等功能。
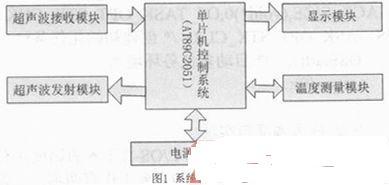
3 系统软件设计
系统软件设计以Keil C51为集成开发环境,采用C语言模块化方式进行系统应用程序编写,软件流程如图5所示。
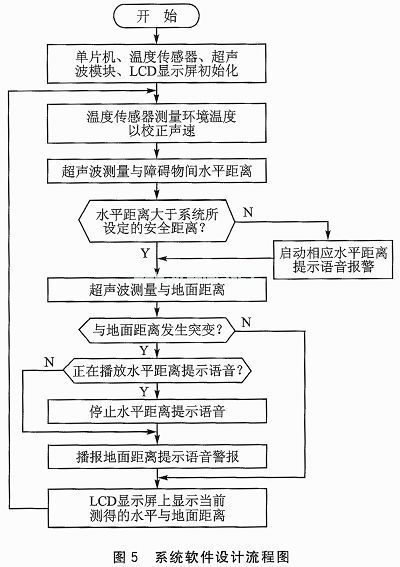
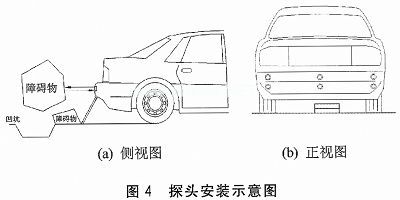
汽车挂倒档时系统上电,首先完成单片机、超声波测距模块、数字温度传感器及LCD显示屏的初始化设置,如具体工作模式、显示方式等。然后,利用温度传感器对当前环境温度进行实时采集以实现声速校正。然后超声波水平测距模块检测与车后障碍物的水平距离,当检测到的水平距离小于系统所设定的安全距离时,立即启动水平距离提示语音,提醒驾驶人员立即停止继续倒车。
同时,超声波地面监测模块测量汽车尾部与地面成60°处的距离,并判断该距离是否发生突变。若检测到的地面距离发生突变,则判断语音报警模块是否正在播放水平距离提示报警语音,若符合判断,则立即停止水平提示报警语音的播放改为进行地面监测语音报警,否则直接进行地面监测语音报警。若没有发生突变,则不进行语音报警提示,而将所检测到的倒车时的水平与地面距离显示在LCD显示屏上,以便驾驶人员获取相关的实时数据,提高倒车的安全性。
4 实验测试
系统性能实验测试,包括水平测距与地面监测两大部分。系统水平测距的实验数据如表1所列。其中,实际值为卷尺所测量的超声波探头与墙壁之间的距离,测量值为所设计系统中的LCD显示值。由表1可知,系统可在3~400 cm实现水平距离准确测量测距,最大误差仅为1.10%,满足倒车需求。

同时,经过多次测试发现,系统均可及时监测出所设定的10 cm以上的凸起及凹坑,并给出相应提示语音警报,系统工作稳定可靠。
结语
通过斜面测距理论分析以及相关实验可知,地面监测模块方向与地面夹角为60°时,满足系统的精准性和实时性要求。
实际运行测试结果表明:结合所设计的温度补偿算法,系统可实现水平精确测距、地面凸起或凹坑的精准识别以及提示语音警报,且可在LCD屏上实时显示水平与地面监测距离。与传统的一维倒车雷达系统相比,提高了倒车安全性,且该系统设计思路同样适用于盲人导航、机器人定位等场合,具有较高的实际应用价值。



评论