基于LMI的无人直升机姿态解耦鲁棒控制器设计

1 引言
本文引用地址:https://www.eepw.com.cn/article/201808/386704.htm目前,随着国民经济的迅速发展,微型无人直升机在越来越多的领域得到应用,例如在消防、电力线缆巡检、反恐、救灾等场合都已经出现了微型无人直升机的身影[1]。但是微型无人直升机具有不稳定、强耦合、不确定、易进入涡环状态、操纵功效和抗风能力差的特点,这就导致无人直升机控制难度大,并对飞行控制系统的各种性能均提出严峻考验。另外,随着进一步的战事和民用的需求,未来的无人直升机将在极为恶劣的环境下完成复杂的战术和战略使命,并且还需要能够实现精确的自动着陆以及故障状态下的容错、自修复控制等,这些都对无人直升机的飞行控制系统提出了极为苛刻的要求。采用传统基于PID的单回路控制器设计方法显然已无法满足高性能无人直升机控制系统的设计要求,因此,进一步加强对无人直升机的先进飞行控制理论和方法的研究,对促进我国无人直升机先进飞行控制技术发展具有重要理论和现实意义。
本论文旨在对面向无人直升机的先进自主飞行控制算法进行研究,为自动飞行控制器的后续设计工作提供指导。基于上述现实原因,本论文的研究内容不仅具有显著的理论和现实意义而且是一个前沿的研究领域[2]。
2 无人直升机动力学模型
2.1 操纵力学结构
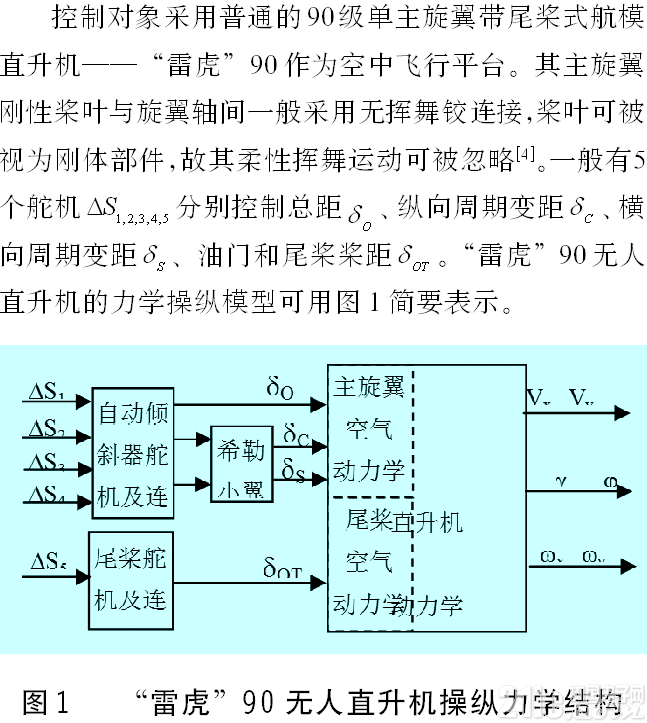
2.2 动力学模型
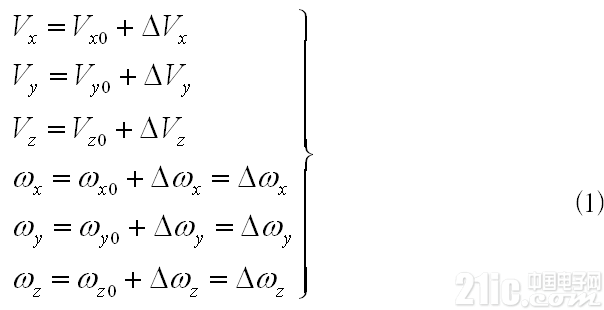
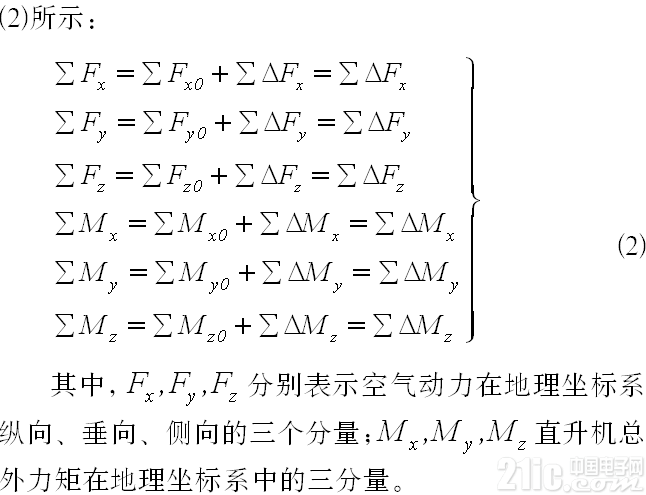
将(1)(2)所描述的参数关系分别带入到直升机受力分析模型[3]之中,并忽略所有的二阶小量,即进行线性化后可以得到下列结果:
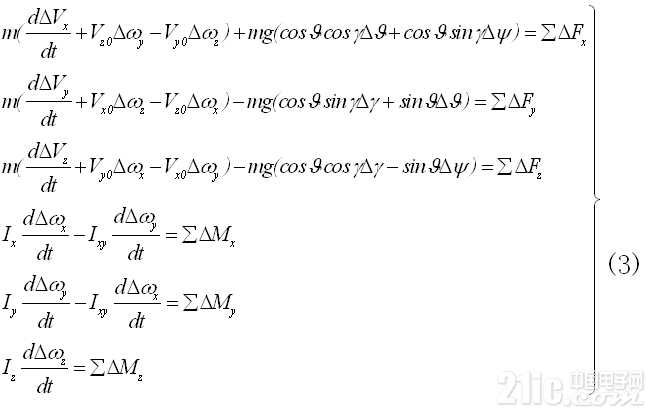
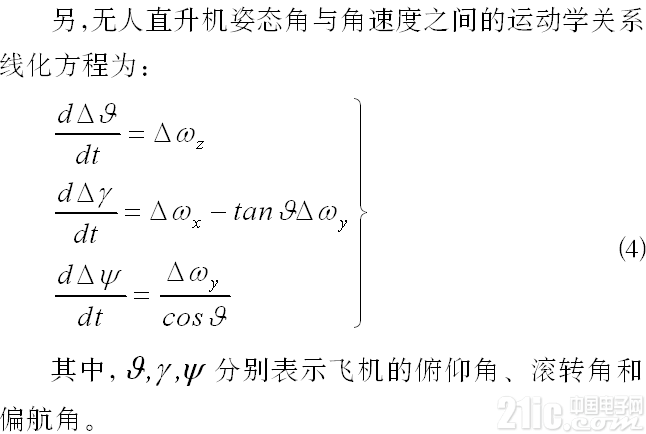
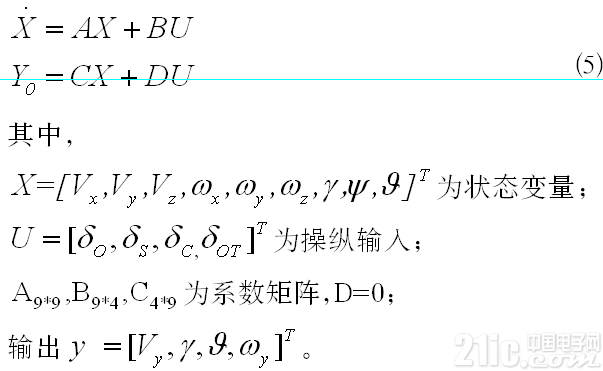
综合式(3)(4)可以得到直升机定常直线飞行时的9阶小扰动线化运动方程的标称状态空间表达式:
3 基于状态反馈的极点配置解耦
3.1 状态反馈解耦控制算法
3.2 期望回路形状
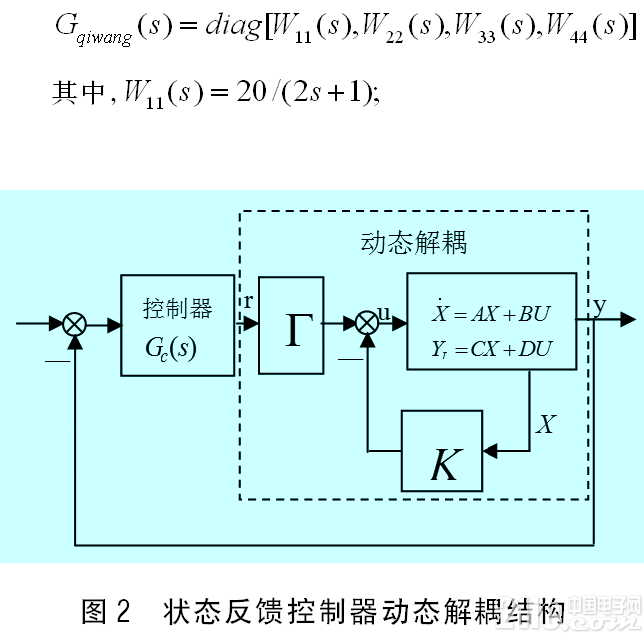
根据ADS—33E—PRF标准,以LEVEL1为设计目标,可以选择四个通道上期望回路形状为[5]:









评论