基于电流纹波的电动车窗位置的准确性判断方法探讨

作者/王道成 秦浩 上海蓥石汽车技术有限公司
本文引用地址:https://www.eepw.com.cn/article/201802/375435.htm随着汽车工业的发展,汽车电子部件越来越多地被应用于现代汽车中,为汽车提供了更好的安全性、舒适性和经济性。以前汽车普遍采用手摇曲柄的方式使车窗玻璃上升或下降,现今轿车很多都安装了电动车窗。而具有防夹功能的电动窗应用于汽车始于20世纪90年代,当玻璃上升途中遇到人力障碍时会自动识别而反向运行,防止乘员夹伤,实现防夹功能。由于该功能的重要性,在欧美新车型上都已成为标准配置,目前国内新推出的高端车型已成为标准配置。由于低成本方案的推出,经济型轿车也开始逐渐配备应用这一功能。而车窗位置判断准确是车窗的防夹功能的正常实现的前提。
1准确判断电动窗位置的重要性
法规规定,具有自动上升功能的车窗必须配备自动防夹功能。即当车窗在自动上升过程中如果,车窗玻璃遇到障碍物。必须做出判断后反转,并且防夹力要小于100 N。而法规规定的防夹区域是4 mm~200 mm(如图1)。这就要求系统对车窗的位置进行准确的计算和判断。

图1 法规防夹区域
如果车窗位置计算不准确会有以下后果:
1) 比如车窗在上升过程中在防夹区域内,如果车窗位置计算不准确,系统判断为防夹区域外。车窗可能遇到障碍物,但是不做防夹反转。而是继续上升玻璃。障碍物如果是人,导致把人夹伤。

图2 防夹车窗
2) 车窗自动上升过程中,如果车窗位置计算不准确,车窗就会到顶部位置认为在防夹区域内,遇堵后反转。导致车窗不能关满。
3) 车窗在上升过程中,由于存在车窗重量和窗框阻力等因素,在每个位置上的阻力大小是不一样的。因此判断车窗位置也是相当重要的。
由以上三点分析可知,车窗位置判断的准确在防夹功能中,既有非常重要的意义。
2电动窗位置判断的原理
从机械的角度讲,电动车窗砸升降时,电机旋转会带动钢丝绳的运动,从而带动车窗的上下开闭。电机每旋转一定的角度,钢丝绳就相应地运动一定行程,因此车窗运动的行程与电机的旋转的圈数成线性关系。通过计算电机旋转的圈数,可以间接算出车窗的位置。
2.1霍尔原理
电机的旋转会使得霍尔传感器产生脉冲信号。玻璃位置的检测是通过对控制模块中的霍尔传感器发出的方波进行计数来实现。软件设计中通过单片机芯片的输入捕捉功能记录车窗运行过程中的脉冲个数,通过学习,将车窗的上密封条记为位置0,而下密封条为最大位置。在车窗上升过程中将位置计数器减1,上升到顶时位置计数器清0,下降时位置计数器加l。因此,可按照要求确定防夹区界限对应的位置计数器的值。通过对位置计数器的值的检测可以间接判断玻璃的位置。

图3 霍尔原理
脉冲计数方式的关键问题在于位置记录要精确,但在试验中却存在电机切断电源后依旧会发出几个脉冲的问题,这几个脉冲由惯性造成,而且不同的玻璃升降器产生的脉冲个数不同。这些脉冲对车窗位置影响随情况的不同而不。在车窗上下两端堵转时,这些脉冲不太可能造成车窗位置的变化,而在中间位置停止时则有可能造成车窗位置移动,特别是下降途中人为停止时对车窗位置的影响更大。为了减小这种影响,与电机通电运动时位置计数一样,在算法中捕捉这些脉冲。如果当前为下降状态,则对电机断电后产生的脉冲进行位置加法操作,如果当前为上升状态,则对电机断电后产生的脉冲进行位置减法操作。
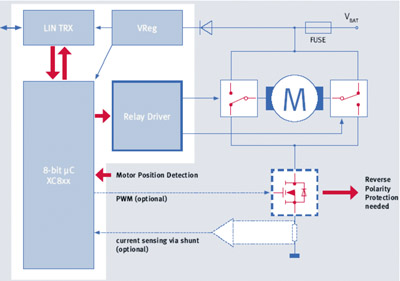
2.2纹波原理
电机有磁极、转子线圈、换向器组成。根据右手定律转子线圈通电后再磁极磁场的作用下产生运动。运动到磁场边缘是磁场变弱,电动势减小,电流增大。换向器改变转子线圈的电流方向,重新进入磁场电动势增大,电流减小。转子线圈不断转动、电动势和电流不断变化,从而纹波不断产生。所以纹波是电机的固有特性,通过计算纹波的个数就能计算出转子换向的次数,就能计算出窗户的相对位置,结合时间就能得出电机的转速。

图4 纹波原理
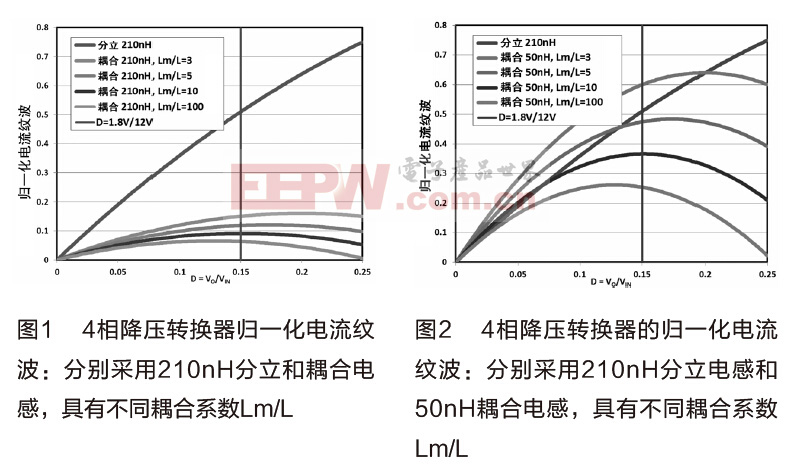
由于电机在启动,停止,反转,堵转时的纹波特征不明显。如图5和图6,不能精准的计数纹波个数。只能通过算法进行补偿。这样纹波计数必然和实际的必然存在误差。而这误差随着车窗操作次数的增加,误差也会跟着累积。

图5 特殊场景一

图6 特殊场景二
出于舒适性对机构噪声要求和电机机构的寿命保护。往往要求车窗到顶和到底停止做软停止,即不是做堵转停止,而是通过准确判断车窗的位置,在接近顶或底的时候,停止对电机的输出,通过惯性将车窗关满。通过策略经过几次的操作车窗后才关闭软停止,做堵转学习车窗位置,消除误差积累。这对车窗位置判断精准度提出了更大的挑战。
3.1霍尔比较法
软件开发前期,使用霍尔电机来开发纹波计数算法。开发2套算法。一套霍尔计数。一套纹波计数。通过霍尔计数值做车窗位置参考。来矫正纹波计数。给纹波补偿和标定提供基准参考。通过高低温高低压组合多次实验,如果通过霍尔计数得出的车窗位置和纹波计数得出的车窗位置做差值。如果在整个实验过程始终是小于4 mm。那么可以认为纹波计算算法是准确的。此方法适用于算法开发阶段,非常方便于开发者,方便做算法优化和标定值选取。但是由于霍尔传感器精度不高,(一般一个霍尔电机上会装有2个霍尔传感器,一个用于计算霍尔方波个数,一个用于相位判断电机的转向)所以霍尔方法本身也会存在一定的误差。只能做参考。真正纹波防夹升降器在产品阶段是没有霍尔传感器的。
3.2多次不到顶和到底操作后4 mm防夹法
有软停止功能的纹波计数的误差清除策略往往是车窗操作经过一个标定值的次数n后进行堵转学习(前n次的停止做软停止,误差会累积)。因此我们可以通过n操作升降窗不到顶和底,不让车窗做堵转学习消除累积误差。在第n+1次后拿4 mm测试棒放在窗顶(如图7.),让其做4mm防夹反转。如果能堵转反转,那么接下来要撤掉4 mm测试棒,执行自动升窗,如果也能完成自动升降并关满车窗。则可以说明纹波计数算法是比较准确的。
为什么第n+1次后防夹反转后还要做确认是否能自动升窗把窗关满这一项。因为第n+1次能防夹反转有可能是误差是向下误差,比如在4 mm处软件算法可能认为是10 mm处或其他。那么误差较大的情况下也可防夹反转。这种情况执行自动上升的时候,在车窗0位置就有可能误认为是防夹区域,从而导致关窗时候遇到顶又做防夹反转,导致关窗不满。如果误差是向上偏的,比如在10 mm位置,纹波计数算法认为是在小于4 mm的非防夹区域,就不做防夹反转。那么车窗就会在4 mm棒处停止升窗。
此方法简单直接,不需要借助太多的测试工具,可操作性强,适用于整个过程。非常适用于测试人员测试验收。

图7 4 mm防夹测试
3.3纹波计数清零判断法
纹波计数算法里,软件里必然有用来代表纹波个数或车窗位置的变量,无论哪种策略,纹波的累积误差的终究是必须消除的。那么在消除清0的前一个值就是误差的累积值。通过监控这个值。如果这个值始终对应的车窗位置是小于4 mm,那么肯定这个纹波计数算法是比较准确的。此方法判断的准确性最高,适用用与整个过程。但是需要借助较多的其他输出显示工具。比较适用于开发人员。不方便测试人员。
4结论
本文首先阐述了电动车窗位置判断准确性的重要性,然后分别介绍了基于霍尔的和基于电流检测的电动窗的位置的判断原理。就基于纹波的电动车窗位置的准确性的判断3个方法进行了列举详细的阐述。综合全文可知,电动窗的位置的判断的准确性对车窗的防夹功能的正常实现影响很大。因此,希望本文档内容能够给国内整车厂和供应商在防夹电动窗开发和评估工人员一些参考。
参考文献:
[1]刘晓明,邵亚辉,吴浩威,等. 无传感器汽车车窗防夹设计[J].微电机,2007(4):48-50.
[2]马伟泽,张申科,汪宏杰.采用霍尔传感器的汽车电动车窗防夹设计[J].汽车工程,2008,30(12):1122-1124.
[3]王晓明,韩阳,任少义,等.车窗升降控制器的防夹测控算法[J].中国科技论文在线,2010,5(8):615-618.
[4]吴志红,陈雅莹,朱元,等.车窗防夹算法的探究和实现[J].电子产品世界,2009(1):88-90.
[5]付朝辉.电动防夹车窗技术探讨[J].汽车电器,2012(7):15-18.
[6]Atmei.AVR480:Anti-Pinch System for Electrical Window[G].2006.



评论