无人飞行器机载稳定云台控制系统的设计

王康南 郑州外国语学校(河南郑州 450001),王利霞 郑州轻工业学院(河南 郑州 450002)
本文引用地址:https://www.eepw.com.cn/article/201802/375433.htm近些年来,无人飞行器在航空摄影、高空遥感以及高空地形勘探等领域得到了广泛发展,机载稳定云台的其应用的关键所在[1-3]。但是在飞行过程中,云台极易受到机体姿态变化、振动以及气流扰动等因素的影响,从而造成机载图像抖动、模糊[4]。针对这一问题,设计出一种适用于无人飞行器的机载稳定云台控制系统。该云台系统采用了三轴稳定结构,控制部分由主控单元模块、姿态检测模块、无刷电机驱动模块等等构成。主控单元通过对姿态检测模块反馈的数据进行互补滤波解算,驱动无刷电机对云台姿态进行实时控制。通过对该云台控制系统的测试与实验,无人飞行器搭载该云台后,机载视频图像更加清晰、稳定,满足了系统设计要求。
1 系统硬件方案设计
1.1总体方案设计
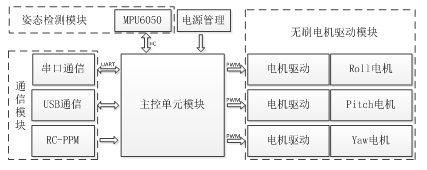
机载稳定云台控制系统主要是通过主控制器对机体扰动的隔离和对其他扰动的补偿或抑制来实现载荷在惯性空间上的稳定,从而使得地面站获取到的机载视频图像稳定且清晰。系统的结构主要包括:主控单元、惯性测量单元、电机驱动单元、图像传输单元、遥控器控制单元以及人机界面。其结构框图如图1所示。

图1 系统总体方案框图
整个工作流程大致可以描述为机载云台系统上电之后,对MEMS传感器的初始姿态信息进行自校准,进行初始姿态信息的解算,驱动力矩电机对机载云台调整到初始姿态位置,完成机载云台的初始化过程。在飞行器的飞行过程中,根据传感器的实时信息不断对姿态信息进行更新,主控单元依据更新后的姿态信息不断地调整机载云台在惯性控制中的位置,保持光学载荷视轴的稳定。光学载荷通过图像传输链路和视频采集卡实时地将机载视频图像传输到地面监控系统,并在监视设备中显示。RC遥控器依据设定的工作模式,通过操作手的实时操作和RC控制链路对机载云台进行控制,从不同角度对地面目标进行实时监测。机载云台系统工作的流程如图2所示。

图2 系统工作流程图
1.2 主控单元设计
在本系统中,主控单元基于嵌入式微控制器STM32F103开发。主要功能是实时完成对MEMS传感器获取的姿态信息的融合,同时接收上位机或RC发来的指令,对俯仰、滚转和偏航3个自由度的电机运动控制单元发送驱动指令,实现隔离机体姿态扰动、保持机载云台在惯性空间中的稳定以及RC控制操作。此外,还应具备与上位机进行人机交互,实现控制参数、电机配置、MEMS传感器校正等基本设置。实现陀螺仪和加速计的补偿、RC遥控模式和范围的设定等高级设置以及MEMS传感器实时数据的显示等等。
1.3电机驱动单元设计
驱动单元起到的是功率放大的作用,即将主控处理器的控制信号转换成可以直接驱动机载云台直流力矩电机的功率信号。由于系统采用的直流力矩电机的堵转电流为2 A,为了保证驱动安全,所选驱动芯片的最大输出电流应大于4 A。因此采用ST公司生产的集成三项半桥驱动芯片L6234D,该芯片具有很强的驱动能力,其驱动电压可达58 V,连续工作时的驱动电流可以达到5 A,具有过流保护和低电压锁存功能。图3是俯仰通道的电机驱动单元的电路原理图,滚转与偏航通道的电机驱动单元与此类似。

图3 电机驱动单元电路原理图
1.4 惯性测量单元设计
整个系统中要求惯性测量单元(Inertial Measurement Unit,IMU)能够提供控制算法中所需的角速度和加速度信号。此外,还考虑机载云台结构和安装位置,要求角速度传感器、加速度传感器及其外围电路的尺寸尽量小,便于整体结构的紧凑。基于上述要求,采用6轴运动传感器MPU6050作为惯性测量元件。IMU单元测量相机在三维空间中的角速度和加速度,并通过自适应互补滤波算法解算出相机的姿态。惯性测量单元的电路原理图及电路实现如图4所示。

图4 MPU6050电路原理图与电路板
2 系统软件方案设计
2.1 主控单元软件设计
主控单元软件完成的主要功能有:对主控处理器I/O口、定时器、串行通信、IIC协议、MPU6050内存储器、位置参数、速度参数、控制参数以及中断向量和优先级进行初始化;确定机载云台在惯性空间内的坐标位置,输出PWM信号驱动电机达到预先设定位置等。主控程序流程图如图5所示。

图5主控程序流程图
在每个控制周期内,外部中断子程序需要完成以下工作:(1)对陀螺仪和加速度计输出信号进行采集;(2)根据RC指令,完成相应位置环的校正运算;(3)完成速度环和稳定环的校正运算;(4)执行PID控制算法;(5)生成PWM信号驱动直流电机。因此,外部中断子程序流程如图6所示。

图6 外部中断子程序流程图
2.2 基于自适应滤波的姿态解算设计
为消除加速度计的噪声干扰和陀螺仪的漂移,获得准确的姿态信息,综合加速度计和陀螺仪各自的优点,应用互补滤波算法(Complementary Filtering, CF),从频域的角度分别加入低通和高通滤波器,将两传感器的姿态信息加以融合,可去除干扰,消除零位误差,提高解算精度[5]。
以俯仰通道为例,互补滤波的原理可描述为:
 (1)
(1)
其中, f1(s) 为一阶低通滤波器传递函数, f2(s)为一阶高通滤波器传递函数,且f1(s)+ f2(s)=1。ωm为陀螺仪测得的旋转角速度。为俯仰角预估值,可通过式(2)计算得到。
 (2)
(2)
其中, 分别为在一段时间内在俯仰、滚转和偏航通道上的加速度平均值。
分别为在一段时间内在俯仰、滚转和偏航通道上的加速度平均值。
从式(1)可以看出,滤波效果取决于参数K的选取。但是在噪声较大时低通的阻带衰减较慢,难以获得较好的滤波效果。为了提高姿态角的解算精度,本文基于常规互补滤波原理,采用一种自适应互补滤波(Adaptive Complementary Filtering, ACF)算法,其原理如图7所示。

图7 ACF原理图
图7中,Kp为比例系数,Ki为积分系数。考虑实时性问题,通常设定Ki保持不变,通过Kp的动态调整实现俯仰角误差的动态补偿。自适应补偿系数Kp的算法如下:
 (3)
(3)
其中,Kp0为初始补偿系数;Kp1姿态临界发散系数。ωmax为陀螺仪的最大量程,ωc为陀螺仪的截止角速度(ωc<ωmax)。
从图7可以看出,加速度计的实时数据由式(2)解算得到俯仰角预估值θ,经过低通环节增加的PI 控制器与陀螺仪的实时数据积分后得到的角度相融合,得到机载云台当前俯仰角 。同时, 作为负反馈,实时机载云台的姿态角。姿态更新算法流程见图8所示。

图8 姿态更新算法流程图
3 实验研究
本文搭建了以ST公司的STM32F103为主控制器,InvenSense公司的MPU6050芯片作为惯性测量单元的机载云台控制器硬件平台,并将其搭载于某多旋翼无人飞行器上进行了机载测试实验,如图9所示。

图9 机载飞行测试实验
依据所选用的惯性测量元件参数可知,陀螺仪的最大量程ωmax =2000°/sec,截止角速度ωc=2πf,陀螺仪截止频率f为100Hz,由PID参数工程整定法得到KP0、KP1分别为5和20。因此自适应补偿系数Kp为:
通过与常规互补滤波算法的对比试验,验证自适应互补滤波算法的有效性。试验结果如图10所示。

图10 算法对比测试试验
其中,图10(a)为采用互补滤波时解算得到的俯仰角和滚转角,其解算误差的均方值约为1.65°和0.39°。图10(b)为采用自适应互补滤波时解算得到的俯仰角和滚转角,其解算误差的均方值约为1.26°和0.15°。初始时刻的俯仰角和滚转角均不处于0°是由于机载云台并非绝对水平导致。
以俯仰通道为例,在机载云台给定俯仰角为0时,通过机载云台的视轴稳定误差实验来验证系统的稳态性能。实验结果如图11所示。从图中可以看出,其稳定误差在±0.02°之间,稳定精度约为0.26 mrad,具有较高的稳定精度。

图11视轴稳定误差曲线
4结论
为了实现多旋翼无人飞行器机载惯性云台的稳定控制,使得机载视频图像稳定清晰,本文设计了一种基于STM32和自适应互补滤波算法的机载稳定云台。姿态解算对比试验结果表明,自适应互补滤波算法效地提高了机载云台姿态的解算精度。视轴稳态精度的实验表明,稳定精度达到0.26 mrad,具有良好的稳态性能,完全满足了多旋翼无人飞行器机载云台的稳定性要求。
参考文献:
[1]申斌,吴一波,林冬生.旋翼机的发展与应用[J].科技传播,2013,(23):145-146.
[2]王日俊,白越,续志军等. 多旋翼无人飞行器机载云台的复合稳定控制方法[J].电光与控制,2016,23(4):17-22.
[3]王日俊. 多旋翼无人飞行器载荷稳像技术研究[D].北京:中国科学院大学,2015.
[4]MILLER RICK, MOOTY GREG. HILKERT.J. M. Gimbal system configurations and line-of-sight control techniques for small UAV applications[C].Proc. SPIE 8713, Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications X, 871308. Baltimore,Maryland,USA,201
[5]傅忠云,刘文波,孙金秋,等.自适应混合滤波算法在微型飞行器姿态估计中的应用[J].传感技术学报,2014,27(5):698-703.


评论