嵌入式系统应用-巴西上空的蜻蜓

巴西世界杯正在如火如荼的进行,各个国家队为了取得好成绩都在加紧训练,然而在这样的紧张气氛下,法国队的训练场上却发生了一件让人哭笑不得的事情。一位球迷由于无法观看比赛,于是操控一架无人飞行器飞到法国队训练场的上空进行偷拍。这件事被各大媒体争相报道,并且还配上了推测的飞行器照片。这种飞行器被称为四旋翼直升机,其典型特征是在十字形固定轴的四个顶点上有四个带螺旋桨的电动机,可以像蜻蜓一样在空中实现悬停、滚动、偏航和上下左右移动等动作。
本文引用地址:https://www.eepw.com.cn/article/201609/305090.htm
相对于比例大小相近的传统遥控直升飞机来说,四旋翼直升机有几个优点。第一,四旋翼直升机不需要机械联动装置来改变螺旋桨转动时的倾斜角度,这就简化了设计和直升机的维护工作。第二,四个电机的配置方式能够让每个螺旋桨的直径小于传统遥控直升机的单一螺旋桨(不包括尾桨),从而减少了飞行过程中产生的动能。这能够让直升机撞到其他物体时减少损伤。对于小型遥控飞行器来说,更小的螺旋桨直径意味着近距离飞行更加安全。有些小型四旋翼直升机为螺旋桨增加了保护罩,使其能够在更复杂的环境中飞行,同时降低了损坏周边事物的危险。
四旋翼直升机实际上是一种由嵌入式系统控制的遥控飞行器。它的硬件系统包括机身和遥控器。机身主要部件有处理器、X-Y轴陀螺仪、Z轴陀螺仪、X-Y-Z轴加速度计、射频通信模块和四个电动机。软件采用诸如uc/OS-II这样的RTOS实时操作系统。在飞行过程中,CPU接收到的控器发出的飞行指令,同时会读取陀螺仪和加速度计的测量结果,然后发出信号调整电动机的转速,从而让直升机按照操纵者的意愿飞行。
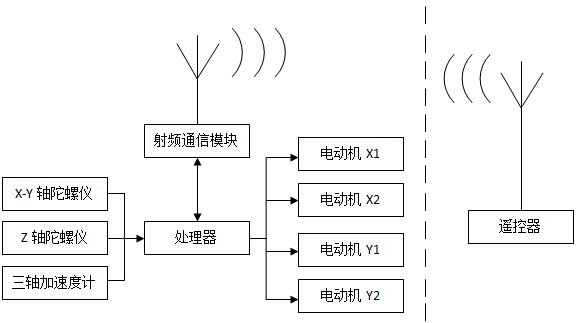
为了让整个系统正常工作,处理器必须不断地与周边设备通信,以便收集数据和发出指令。在四旋翼直升机的方案中,陀螺仪的模拟信号输出连接到处理器的模数转换器,射频通信模块通过SPI总线连接到处理器,而三轴加速度计则通过IIC总线与处理器通信。这些通信功能都需要在开发过程中进行考虑。
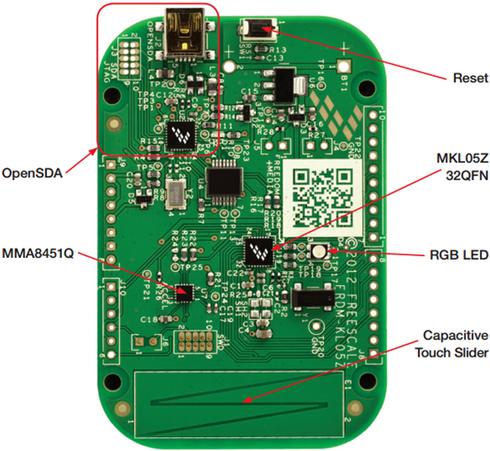
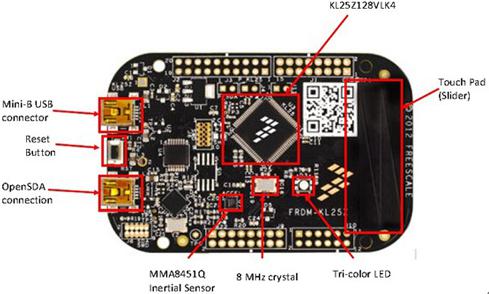
英蓓特科技公司推出的FRDM-KL05Z(上)和FRDM-KL25Z(下)开发板基于Freescale的Kinetis L系列微控制器。Kinetis L系列微控制器采用ARM Cortex-M0+内核,具有高能效和高性能的特点,集成了SPI和IIC总线以及MMA8451Q三轴加速计和AD转换器,完美的满足了四旋翼直升机的开发要求。基于该系列微控制器的这两个开发板体积小巧,非常适合于四旋翼直升机这样对整体重量敏感的开发项目。另外,FRDM-KL05Z和FRDM-KL25Z开发板还提供了兼容Arduino的扩展接口,为更多附加功能的开发提供了最大的可能性。同时,英蓓特科技拥有专业的技术团队和深厚的嵌入式开发经验,能够为设计人员提供完善的技术支持和软件资源。有了硬件、软件以及技术支持的保证,FRDM-KL05Z和FRDM-KL25Z开发板不仅适用于四旋翼直升机的开发,而且能够满足小型电气、游戏配件、便携式医疗设备、音频系统、智能仪表、照明及电源控制等应用的需求。








评论