基于FPGA嵌入式系统的雷达信号模拟器

FPGA作为高性能数字信号处理系统中的关键部件,在雷达信号模拟和雷达信号采集等方面有着巨大的开发潜能,采用这些技术对雷达系统和环境进行模拟,可重复性高,可以多次模拟同一情况下雷达的性能,便于分析。目前对雷达信号模拟器的研究比较多,通用的方式是软硬件相结合,使系统既有很大灵活性又可以满足信号实时输出的要求。以往的设计中FPGA一般用来控制整个系统的时序,本设计采用集成微处理器的FPGA,同时完成信号模拟和时序控制的功能,改变了以往信号处理DSP+FPGA 中FPGA作为协处理器的模式[1-3]。整个设计仅需要具有嵌入内核的FPGA和简单的外围电路,使系统的集成度更高,由于FPGA在信号处理中并行处理的优势,系统实时性强。系统采用工业标准的总线结构以及模块化设计,具有良好的通用性、兼容性以及可扩充性。
1 系统组成
1.1 雷达信号的模拟
雷达信号模拟模块(如图1)主要完成对雷达中频和视频模拟。其中中频信号模拟可以模拟产生雷达中频线性调频脉冲信号,视频信号模拟可以模拟一路非相参视频信号或两路相参视频信号。雷达信号模拟模块内部包括:天线控制、触发控制、波门控制以及信号产生等子模块。天线控制模块根据天线参数产生天线扫描信号;触发控制模块根据触发信号参数产生周期性的触发脉冲信号;波门控制模块根据天线扫描信号、触发脉冲信号以及目标方位、仰角和距离参数在指定方位、仰角和距离上选通波门输出目标信号,信号产生模块根据参数设置产生对应幅度。
1.2 杂波的模拟
杂波是雷达回波的重要组成部分,只有对杂波有效的建模,并将其叠加在目标信号上,才能使模拟出的雷达回波更接近真实情况。通常该模型用统计随机过程来描述。杂波的模拟有2种途径:(1)利用Matlab在电脑上产生。首先根据雷达环境和被测雷达参数,选择合适的杂波模型以及统计特征参数,建立杂波数据库;然后在计算机中利用零记忆非线性变换法产生杂波随机序列[4]。目前最常用的杂波幅度分布模型有韦布尔模型、对数正态模型和K分布模型,设计中产生表示雷达杂波幅度的N 个数据样本Z1,Z2,…ZN,这些样本具有上述某种给定的概率分布和任意给定的功率谱,将这些随机样本序列在磁盘上保存下来。PC机上实现随机序列,具有幅度分布和频谱特性可选择的优点。(2)利用线性反馈移位寄存器(LFSR)产生随机的数字噪声。LFSR可以被视为一个线性移位寄存器组,并且每个寄存器的输入都是它前一个寄存器输出的一个线性函数。在FPGA中设计一个16 bit随机数字噪声模拟模块,此序列发生器的初始值为0XFFFF,数字噪声信号的周期为216-1=65 535。基于硬件实现的随机序列,具有循环周期长、随机性好、资源消耗少的优点。
在实时模拟时,基于雷达天线波束与杂波区域几何关系,用户可以根据情况选择使用哪种方法产生随机序列,通过硬件和软件系统直接模拟雷达的杂波回波信号。
1.3 干扰信号的模拟
雷达干扰信号的模拟能够模拟真实战场环境下的一些干扰信号,包括噪声干扰以及欺骗性干扰,从而可实现对雷达抗干扰性能的检测。噪声干扰包括多普勒噪声干扰、瞄准式噪声干扰、调频噪声干扰;欺骗干扰包括距离欺骗、速度欺骗、假目标等。
噪声干扰信号的形式比较复杂,主要是通过上位机产生对应的数据,以文本的形式存储下来。在配置FPGA时,将文本文件作为ROM的初始化文件,在编程过程中以查表的形式生成噪声干扰信号。
对脉冲雷达距离信息的欺骗主要是通过对收到的雷达照射信号进行延时调制和放大转发来实现。由于单纯的距离质心干扰造成的距离误差较小(小于雷达的距离分辨单元),所以对脉冲雷达距离信息的欺骗主要采用距离假目标干扰和距离波门拖引干扰。距离假目标干扰的模拟在FPGA中体现出来的就是2组重复频率不同的脉冲串,2组脉冲串之间的时间差就对应着延时调制,可以通过计数器控制2个脉冲之间的延迟调制。波门拖引干扰时,通过FPGA控制脉冲宽度和对应的功率水平,最终将目标回波脉冲分为2个脉冲,且假目标的功率水平比真实目标的功率水平要高。
1.4 实测数据的信号重构
国内在雷达数据采集方面的研究日趋成熟,基于PCI、USB接口的数据采集系统都能满足雷达中视频采样的要求,而且可以根据需要将采集的数据存盘或软件实时回放处理[5-7]。本系统解决的问题是将系统采集到的数据或磁盘阵列上存储的其他系统采集到的雷达实测数据通过模拟系统重构出雷达回波信号,做到真实环境的可重复再现,为雷达接收系统性能的检测提供了有利条件。信号重构过程需要知道雷达回波采样时的采样率,保证模拟系统DA信号输出的速率与数据采集时的采样速率一致,避免采集和恢复速率的不匹配造成雷达信号的非线性失真。同时实测数据帧的组成形式必须是已知的,这样才能提取雷达信号的同步、方位、仰角等信息,将对应的幅度信息与方位、仰角同步。
2 具体实现
2.1 硬件设计
FPGA采用的是Xilinx公司的100万门FPGA芯片XC3S1000,其配置芯片为Xilinx公司的4 MB容量PROM芯片XCF04S,以主动串行方式对FPGA进行上电配置。AD、DA分别为ADI公司12位105 MS/s高速模/数转换芯片AD9432与14位105 MS/s高速数/模转换芯片AD9764。SRAM采用Cypress公司的256k×16 bit SRA。
M芯片CY7C1041用于对数据进行大容量缓存,以满足USB的传输需要。USB控制器选用Cypress公司的 EZ-USB FX2系列USB2.0芯片CY7C68013,封装为PQFP128。它支持USB2.0高速传送,最高速率可达480 Mb/s。系统框图如图2所示。
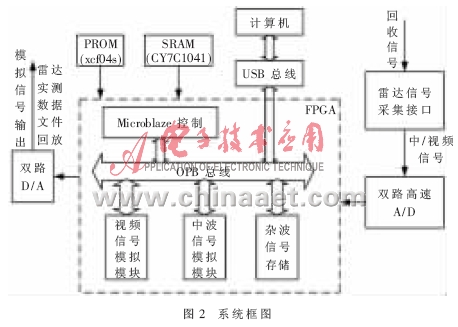
FPGA程序主要包括雷达信号模拟模块、雷达信号采集与传输控制模块和SDK中Microblaze的控制与参数传递模块。雷达信号模拟模块主要完成对雷达中频/视频和杂波信号的模拟,为雷达的接收系统和信号采集模块提供自检测试信号。雷达信号采集与传输控制模块主要完成对雷达中频/视频信号的采集与传输控制,该模块为系统真实回波的模拟提供了实测数据。参数的传递主要由两部分组成:上位机的信号参数输入或信号模拟系统自带的键盘扫描输入与 Microblaze核之间的参数传递;Microblaze将对应的输入参数通过中断调用的形式传递给信号或杂波产生模块。在ISE 9.1环境下通过VHDL硬件语言产生脉冲、LFM等信号,利用EDK 9.1的附件将在ISE 9.1中产生的信号模块转化为对应的IP核 [8]。在EDK开发中,可以将在ISE中产生的信号模拟的IP核直接添加到工程中,IP核和Microblaze处理器之间通过OPB总线实现信号参数和中断信号的传递,使整个开发过程模块化。基于FPGA的嵌入式系统设计的EDK开发中有硬件模块设计和软件控制2个部分,使整个系统兼容了FPGA并行处理的高速率和软件编程的简洁。
2.3 驱动程序设计与使用
FX2的设备驱动程序有2种:一种用来在设备接入时从主机下载固件到RAM中,称为固件下载驱动程序(wdgtldr.sys);另一种是在设备重新列举后加载的通用设备驱动程序(ezusb.sys),应用软件通过该设备驱动程序与FX2通信[9]。
固件下载驱动程序(wdgtldr.sys)是利用Cypress公司提供的固件下载驱动程序源代码和用户编译成功的固件代码,在Win2000 DDK中创建的。在将固件代码下载到RAM中后,系统清除内存中的固件下载驱动程序,并进行重新列举,让8051固件控制FX2。此时,系统获得由 8051固件提供的新的ID号,认为有新的USB设备接入,并据此加载相应的通用设备驱动程序。通用设备驱动程序一般不需要重新编写,可以直接使用 Cypress公司已经编好的驱动程序ezusb.sys。
3 系统调试结果
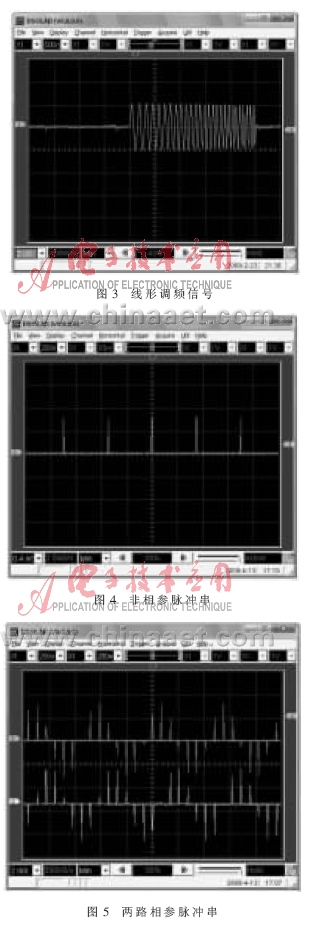
利用信号模拟产生一些典型的雷达视频信号,验证了系统在工程上的可行性。图3为频率控制字为1 500时的线性调频脉冲信号,脉宽为10 μs;图4为非相参视频脉冲串,脉冲宽度为10 μs,重复周期为700 μs;图5为相参视频脉冲串,脉冲宽度为10 μs,重复周期为700 μs,多普勒调制频率为200 Hz。









评论