电动摩托车用无刷直流电机控制系统的设计

摘要:根据无刷直流电机的工作原理,设计了一种以PIC16F737单片机为控制核心的电动摩托车用无刷直流电机控制系统,给出了系统详细的硬件电路和软件设计方法,实现了电动摩托车定速和调速两种工作模式的选择。实验证明该设计方案控制电路简洁,器件少,成本低,保护措施可靠,提高了系统的控制精度,对无刷直流电机在其他领域的应用有一定的帮助和借鉴,具有广泛的现实意义。
关键词:无刷直流电机;PIC16F737;电动摩托车;控制系统
无刷直流电机(Brushless DC Motor,BLDCM)是随着新型电力电子器件和永磁材料的发展而成熟起来的一种新型电机,它属于同步电机的范畴,既具有交流电机运行可靠的优点,又具有传统有刷直流电机优越的调速性能,因此具有广泛的应用前景。
随着人们生活水平及环保意识的不断提高,具名“绿色化”发展理念的新型电动交通工具将在世界各地大行其道,电动摩托车必将成为人类的主要代步工具之一。采用无刷直流电机的电动摩托车作为绿色环保交通工具,具有操作简单、骑乘舒适、维护方便、污染小和噪声低等优点。
PIC系列单片机是采用精简指令集RISC技术、哈佛总线和两级指令流水线结构的高性能价格比的8位嵌入式控制器(Embedded Controll er)。在此研究的电动摩托车控制系统是一个以PIC16F737单片机为核心,无刷直流电机为控制对象的系统。
1 控制系统的实现
控制系统的原理框图如图1所示。

主要组成部分:
1)主控模块:由PIC16F737单片机、+5 V电源及外围辅助电路组成。
2)输入电路:由位置信号检测、电流信号检测电路、转把刹车信号采集电路组成。
3)输出电路:由IR2110为核心的驱动电路和逆变电路组成。
4)保护电路:由过流保护电路、过压保护电路及报警电路等组成。
工作原理:单片机作为控制核心将位置检测、电流检测的信号处理输出对应的PWM波经驱动芯片,驱动6个功率场效应管,由其组成的三相全桥驱动电路对电机进行控制,因此可以对电机进行位置环、速度环和电流环的三闭环控制。当刹车信号出现或电机出现堵转而引起电流超限时,单片机立刻切断逆变电路;当电池电压低于设定时,自动切断电机驱动电路,以防电池过放电而损坏。
1.1 系统硬件设计
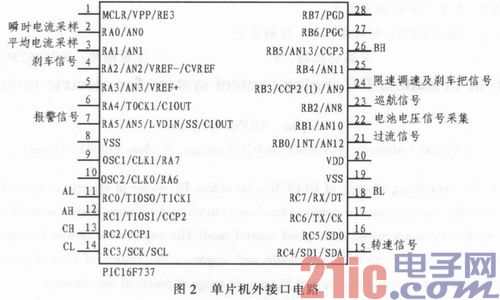
1)主控模块
单片机外接口电路如图2所示。主要包括:电流采样包括瞬时电流采样信号输入量接RA0口,平均电流采样信号输入量接RA1口;过流保护中断请求连接单片机的RB0口;电池电量检测信号接RB1口,48 V电压对应的采集电压是2.66 V,低于40 V时对应的采集电压是2.1 V此时需要保护;转把调速模拟输入量接RB3口,制动手柄模拟输入量接RA2口;附加功能输入包括报警和巡航,输入量分别接RA5口和RB2口;3个霍尔转子位置传感器输入Ha、Hb、Hc信号分别接RB7口、RB6口、RB5口;逆变电路中功率开关管驱动输出,实现无刷电机电子换向及无级调速。
2)输入电路
①霍尔信号输入
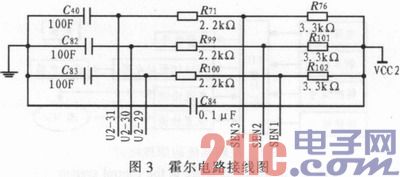
转子位置检测电路在系统中的作用有两个:检测电机定、转子的相对位置为逆变电路提供正确的换相信号;通过检测某路霍尔脉冲信号的个数,计算后转换为速度信号,构成速度反馈环节。本系统的位置信号采样是通过无刷直流电动机本身自带的霍尔元件来检测的,由于霍尔元件是集电极开路输出,其输出信号经过上拉电阻得出位置方波信号,再经过隔离电路送到单片机的引脚(U2—29、U2—30、U2—31)进行位置信号的捕捉,如图3所示。
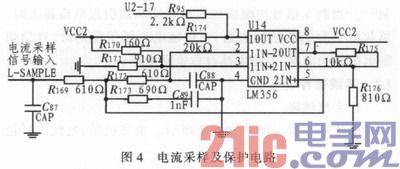
②电流检测电路
该电流检测电路由2个LM358运算放大器组成,如图4所示。其中一个构成了电压比较器,把检测的电流信号与已知电压比较,得到过流输出信号,过流时比较器翻转触发单片机中断,及时关断功率开关管形成保护电路。内部电流环电流通过另外一个由LM358运算放大器构成的同相比例放大电路来获得,经放大后转化为与电流成正比的电压信号送入单片机PA2口。
3)输出电路
①逆变电路设计
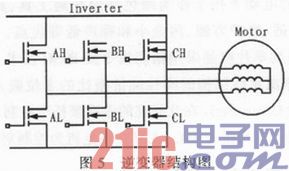
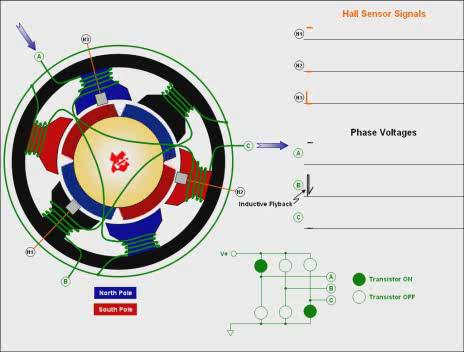
电机转动由霍尔传感器感应到的电机转子所在位置,决定开启或关闭逆变器中功率晶体管的顺序来控制,如图5所示逆变器中的AH、BH、CH(上桥臂功率晶体管)及AL、BL、CL(下桥臂功率晶体管),使电流依序流经电机线圈,产生顺向或逆向旋转磁场,并与转子磁铁产生的磁场相互作用,使电机顺向或逆向转动。当电机转子转动到霍尔传感器感应出另一组信号的位置时,控制部分又再开启下一组功率晶体管,如此循环,电机就可以实现转动。
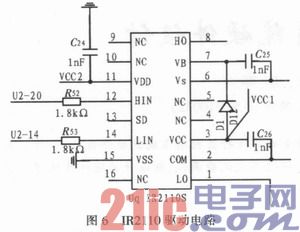
②IR2110驱动电路
IR2110芯片是一种双通道、栅极驱动、高压高速功率器件的单片式集成驱动模块。如图6所示,是由IR2110组成的无刷直流电机驱动电路原理图(单桥臂)。此驱动电路采用以3片IR2110为中心的6个N沟道的MOSFET管组成的三相全桥逆变电路,上桥臂采用PWM调制的控制方式;下桥臂采用固定角度控制方式,由此驱动无刷直流电动机。
1.2 系统软件设计
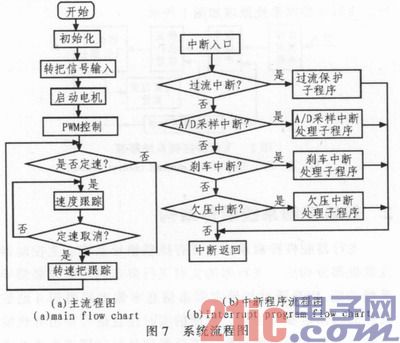
软件设计是整个控制系统设计的核心部分,它将直接决定了整个控制系统的控制质量和它的效率,决定系统输出信号的特性,包括电流大小及稳定度、谐波含量、保护功能的完善、可靠性等。PIC芯片是在其专门的软件开发环境Mplab进行程序编写与仿真的,这给开发者设计调试程序带来了极大的方便。该系统软件设计重点是主程序和中断服务程序,流程图如图7所示,主程序实现了各变量和芯片的初始化、巡航模式非巡航模式2种工作模式的选择;中断服务程序包括过流欠压中断子程序、A/D转换中断服务子程序、刹车中断子程序。
2 结束语
文中所设计的基于PIC16F737的控制系统硬件结构简单、保护功能完善、软件采用模块化设计、易于用户二次开发、系统可靠性强、调试方便等特点。本文的创新点在于实现了电机的调速及定速两种工作模式的选择,同时从软硬件2个方面实现了系统的欠压保护,过流保护。整个系统在实际应用中启动平稳、带载能力强、能够实现快速精准的调速、现场运行良好。






评论