基于FPGA的无刷直流电机调速系统设计与实现

摘要:以FPGA为控制器,使用霍尔传感器进行电机电流及位置的检测,用MOSFET搭接成的驱动电路进行控制电机的转速和转向,用VHDL语言设计了一种PWM调节电机速度的方法。通过对系统进行理论分析以及调试,实现了电机电流、位置的检测并控制电机速度和转向从而达到要求的速度和方向。
本文引用地址:https://www.eepw.com.cn/article/201609/303562.htm无刷直流电机具有结构简单、体积小、效率高、无级调速、调速范围广、过载能力强等优点,在许多领域得到了广泛的运用,特别是在高性能的伺服驱动领域,在这些领域要求控制器体积小,还要求对多台电机并行控制,单芯片大容量现场可编程门阵列(FPGA)能够实现在系统芯片上实现多台电机的复杂控制功能,大大减小了控制系统的体积。
本文提出了一种无刷直流电动机速度控制器的方案,利用现场可编程门阵列FPGA芯片对电机控制器的进行控制,设计了利用此控制器对无刷直流电机进行调速控制的PWM方法。采用VHDL硬件描述语言实现了转子位置检测电路、驱动电路和电流检测电路,整个控制系统响应速度快、超调小、稳态误差小、可靠性高、灵活性强。
1 无刷直流电机调速系统总体设计
1.1 无刷直流电机调速系统的方案论证
所谓无刷直流电机调速系统,其主要在于PWM调速方法的设计,目的是改变脉冲的占空比。其核心在于智能控制,需要选择一个智能的控制器,而且系统需要的是简单高效,对于开关控制以及信号处理的速度要求并不高,因此采用ALTERA公司的现场可编程门阵列CycloneIII FPGA芯片。
1.2 无刷直流电机调速系统设计思路
无刷直流电机调速系统以FPGA为中心,配有电流检测模块、位置检测模块、驱动模块、PWM调节等模块,利用霍尔传感器来检测电机电流和电机转子位置,把采集的信号送给FPGA进行处理从而按照人为设定的电机初始速度来发出相应的加、减速和电机正、反转命令并执行。
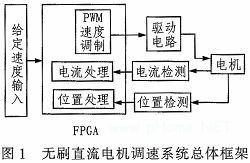
从系统总体框架图中可以看出,系统主要由驱动模块、电流检测模块、位置检测模块以及PWM调节模块。
无刷直流电机调速系统是这样工作的:当打开电机驱动开关时,电机开始转动,此时位置检测和电流检测电路开始工作以检测电机速度,并将信号传送给FPGA进行处理,如果电机速度大于所需要的电机转速,此时控制电机减速,反之则控制电机加速。在此期间,可以通过按动按键来控制电机的正反转。
2 无刷直流电机调速系统的硬件电路设计
2.1 无刷直流电机调速系统的电流检测电路
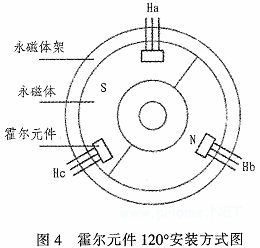
采用基于霍尔效应的线性电流传感器ACS712芯片进行电流检测,该器件内置有精确的低偏置的线性霍尔传感器电路,能输出与检测的交流或直流电流成比例的电压。可以精
确的检测电机电流,但由于霍尔元件检测的信号非常小,所以要将采集的信号进行放大后送给FPGA,选用芯片LM321进行信号放大,具体电路如图2所示。
2.2 无刷直流电机调速系统的位置检测电路
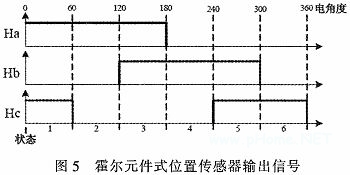
位置信号检测可以用于电机的换相,还能用来计算电机转速,在无刷直流电机控制中起着十分重要的作用。本设计是采用三个霍尔位置传感器来实现位置检测的,每个霍尔位置传感器输出脉宽180°互差120°相位的霍尔位置信号,三个霍尔位置传感器输出三路位置信号,电机每旋转360°电角度会出现六个上升沿和下降沿,正好把三路位置信号在一个周期分成6个区间,每个区间对应一个换相区间,而每个上升沿或下降沿都对应一个换相时刻,如图4所示。
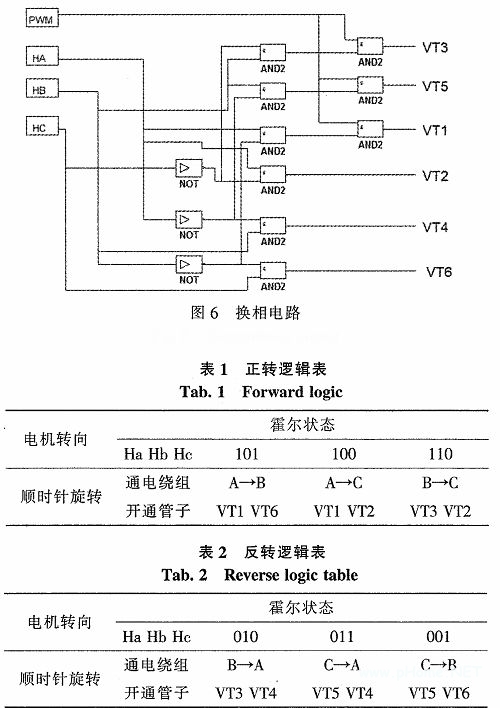
2.3 换相电路设计
根据无刷直流电机模块中输出的三相霍尔位置信号,以及无刷直流电机速度控制模块输出的PWM信号,逻辑换相模块输出6个电机换相及速度控制脉冲。输入4个信号,分别是三相霍尔位置信号(HA、HB、HC)和由控制模块输出PWM信号。6个输出信号VT1~VT6控制三相逆变器功率管的通断,其中VT1、VT3、VT5用于控制上侧功率管的通断,VT2、VT4、VT6用于控制下侧功率管的通断。三相逆变桥采用上管调制的方式,逻辑关系构造逻辑换相模型如图5。
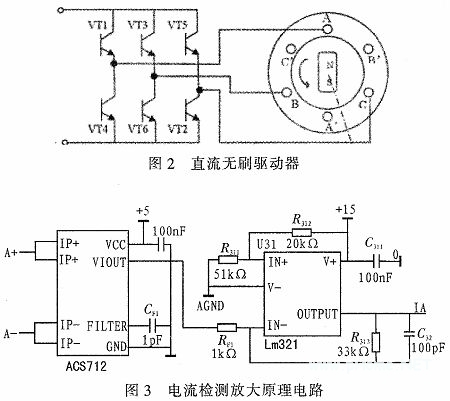
2.4 无刷直流电机调速系统的驱动电路
采用的是6个MOSFET搭建而成的三相桥式逆变器,MOSFET是开关速度快的理想电压控制器件,其驱动电路较为简单,特别适合于各类中小功率开关电路。同时采用IR2132专用集成驱动芯片,它是专为功率MOSFET驱动而设计的,方便于控制电路连接,其驱动信号延时为纳秒级,开关频率高,体积小,外围走线简单,适合中小型电机驱动电路的应用。6个MOSFET根据所接收到的信号从而改变管子的通断来控制电机的转动。
3 无刷直流电机调速系统的软件设计
3.1 无刷直流电机PWM调速软件设计
PWM调速产生电路是由加减计数器、5位二进制计数器、数字比较器三部分组成。加减计数器做细分计数器,确定脉冲宽度。当U_D=1时,输入CLK1,使设定值计数器的输出值增加,PWM的占空比增加,电机转速加快;当U_D=0,输入CLK1,使设定值计数器的输出值减小,PWM的占空比减小,电机转速变慢。5位二进制计数器在CLK0的作用下输出周期性线性增加的锯齿波。当计数值小于设定值时,数字比较器输出高电平,当计数值大于设定值时,数字比较器输出低电平,从而产生周期性的PWM波形。设定ZF为电机的方向按键,选择PWM波形的进入方向,当其为1时,电机正转,否则反转。设定START进行电机的控制时,START为1电机开始工作,为0电机停止工作。通过按键EN1的闭合与断开可以改变初始值,从而改变直流电机的PWM占空比,改变直流电机速度。










评论