组合导航定位技术在机车安全监控系统中的应用研究

针对目前火车机车监控系统中GPS定位精度低、抗遮蔽性差的问题,提出了一种基于GPS、ADXRS150微硅陀螺仪和机车速度传感器的组合导航定位设计方案,建立了组合导航信息融合算法模型,给出了实验结果数据。
本文引用地址:https://www.eepw.com.cn/article/197816.htm 在实际应用中准确判断了机车进站轨道,提高了定位精度,为机车的远程监控提供了可靠的位置数据。
从1997年至今我国铁路实施了五次大提速,提速网络基本覆盖了全国主要地区,特快列车最高时速从120公里提高到了160~200公里。随着机车运行速度的提高,对安全可靠性的要求也相应提高,这就需要对系统进行同步改造,加强监控措施,确保运行安全。行车安全监控是铁路信息化总体规划应用体系中的重要组成部分,是提高铁路运输安全保障能力的重要技术手段。组合导航定位技术在机车安全监控系统中的应用,可以解决单一GPS定位精度低、抗遮蔽性差的问题[1],实现机车运行轨迹的准确定位和进站轨道的准确判断,为行车安全监控系统提供可靠的运行数据。
1 机车组合导航定位终端设计原理
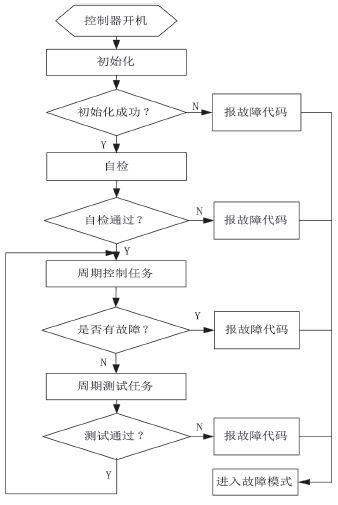
机车组合导航定位终端要求对GPS信息、陀螺仪信息、机车速度传感信息进行融合处理,并将融合处理后的信息通过GPRS无线网络传输到监控中心。同时,在本地采用大容量Flash存储器,保存轨道线路的一些特征参数,该特征参数可以通过无线方式自动更新,确保轨道特征参数的实时性。终端通过对采集到的各种状态信息进行融合处理,并和轨道特征参数进行比较,发出各种提示信号。终端原理图如图1所示。

系统主控CPU为LPC2138,该CPU为ARM7内核[2],负责对各种信息的融合处理;GPS模块采用GARMIN15 引擎板,在定位情况下,用于获取机车所在位置的经度、纬度、海拔高度信息;ADXRS150微硅陀螺仪,用于获取机车的角速度信息。AD574是12位 A/D转换芯片,用于对ADXRS150微硅陀螺仪输出的模拟角速度信号进行采样和量化;三星K9F5608 Flash用于存储轨道的一些特征参数;电源管理模块输入为110V直流电源,输出为12V、5V、3.3V电压,为各模块的正常工作提供稳定的电源。
2 组合定位信息的分析与处理
2.1 GPS定位信息
GARMIN15 GPS引擎板定位精度15米(无干扰),输出数据格式为NMEA0183。该格式包含多种语句,其中GPRMC是最常用的语句,该语句说明了所在位置的经度、纬度、时间、海拔高度以及目前的速度等信息。其具体语句格式为:$GPRMC,1>,2>,3>,4>,5>,6>,7>,8>,9>,10>,11>,12>? 鄢hh。GPS引擎板每隔1秒钟通过串口输出一次数据,其串口波特率为9600bps。GPS在定位的情况下能够提供非常准确的时间信息。








评论