AUTOSAR CAN诊断实现

AUTOSAR是由全球汽车OEM和供应商共同推出的一种汽车电子嵌入式软体分层架构。该分层架构由微控制器抽象层、ECU抽象层、服务层、执行时环境(RTE)和应用层组成,前叁层被统称为基础软体(BSW)。
本文引用地址:https://www.eepw.com.cn/article/197621.htmAUTOSAR各层软体的通讯透过叁类介面实现,分别是标式槊妗AUTOSAR介面和标AUTOSAR介面。其中,标式槊嬗糜BSW各个模组之间的通讯,已用C语言定义,如void Adc_Init(const Adc_ConfigType* ConfigPtr)。AUTOSAR介面用于软体构件(SW-C)之间的通讯或者软体构件和ECU韧体(IO硬体抽象、复杂设备驱动)之间的通讯,这类介面命名以‘Rte_’为前缀。标AUTOSAR介面用于软体构件存取AUTOSAR服务。依赖这种分层架构和介面定义,AUTOSR显着提高了汽车电子嵌入式软体的再使用性──层级越高者,再使用性越强。值得注意的是:
* 微控制器抽象层层级最低,随微控制器的更换而更换;
* RTE虽然层级仅低于应用层,但由于它负责着应用层和BSW之间的桥抛饔茫和硬体的耦合性最高,不具有再使用性;
* 应用层(除感测器、执行器相关的软体构件外)完全独立于硬体,具有绝对的再使用性。
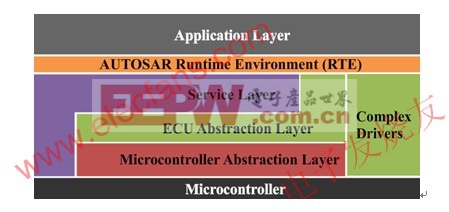
图1 AUTOSAR分层架构
*
汽车诊断简介
目前,整车厂和供应商裼迷谙哒锒嫌肜胂哒锒舷嘟岷系恼锒戏椒āT谙哒锒贤腹ECU内部软硬体实现自诊断。在汽车执行过程中,自诊断系统即时监控电子控制系统各组成部份的工作状态,因而检测电子控制系统中的故障。自诊断系统一方面将检测出的故障透过一定的方式(比如警报指示灯)向驾驶员发出警告,另一方面将故障程式码及相关数据存入ECU记忆体。离线诊断透过外部诊断设备读取相应的诊断资讯,实现诊断作业。实现离线诊断的关键在于如何实现诊断设备和ECU之间的通讯机制和诊断服务,即诊断协议。
目前,诊断协议标手饕分为ISO和SAE两种体系。美国使用SAE标侍逑担包括中国在内的多数国家使用ISO标侍逑怠T诔擞贸盗煊颍OEM正从自定义诊断协议逐渐转向ISO标省T谏逃贸盗煊颍OEM沿用SAE诊断,欧洲OEM在此基础上增加了ISO诊断。表1列出了部份ISO和SAE标识哉铡
AUTOSAR CAN诊断实现
1) 诊断服务
目前,AUTOSAR V3.1诊断部份支援9个OBD服务(如表2所示),14个UDS服务(如表3所示)。
依据表2和表3可知,AUTOSAR不支援OBD中的0x05服务(请求氧感测器监测结果),塬因在于基于CAN线的0x05服务在0x06中实现。不支援UDS中的0x28(通讯控制)、0x34(程式下载)、0x35(程式上传)、0x36(数据传输)和0x37(请求传输煺出)服务,且0x10服务不支援编程会话和扩展会话这两种子功能。这些服务主要用于ECU重新编程,因此AUTOSAR不支援Bootloader。
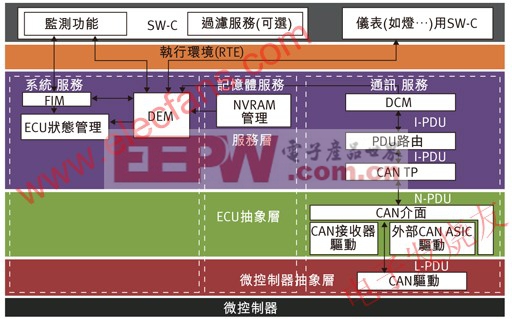
图2 AUTOSAR CAN诊断相关模组









评论