基于模糊PD控制的电动助力转向系统建模及仿真分析

电动助力转向系统其本身是一个比较复杂的非线性随动系统,这就决定了获取系统精确的数学模型的有很大困难。另外系统本身受到诸如车速、扭矩测量装置精度与灵敏度、路况等因素产生的系统扰动等变数的影响,事实上对系统对精确度要求不是非常高,而对系统的实时性要求比较高。而糊控制器不依赖系统的精确数学模型,对系统参数变化不很敏感,具有很强的鲁棒性和控制稳定性。很适合汽车这一类快速动态统。
本文引用地址:https://www.eepw.com.cn/article/197037.htm针对转向系统的“轻”与“灵”的矛盾(车转向系统的转向轻便性与路感相互制约的现象)提出一种能获得理想助力特性的策略,并根据此策略确定了一种双模糊表的模糊自调整PD控制器。很好地解决了“轻”与“灵”的矛盾,并在提高轻便性的同时保证驾驶员可以获得充分的路感。
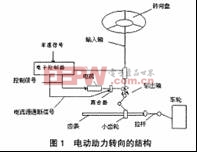
1 电动助力转向的工作原理
驾驶员根据路感操纵方向盘时,扭矩传感器将检测输入扭矩的大小和方向信号传给控制器,控制器根据扭矩传感器信号确定助力扭矩的大小和方向,即通过调整直流电动机的电枢电压控制电枢电流,从而调整转向助力的大小和方向。同时控制器还根据不同车速调整助力大小。车速越低助力越大,车速越大助力越小。当车速大于一定值时,取消助力,将直流电动机反接制动,使汽车高速行驶时方向感沉稳,行驶安全。
2 电动助力转向的数学模
2.1 汽车2自由度转向模型
将汽车简化为一个具有侧向和横摆运动的2自由度的汽车模型,当其侧偏角很小(小于5°)时,其运动微分方程。

2.2 EPS的模型
EPS的控制目标是改善汽车操纵的轻便和转向的灵活性,评价汽车转向系统的轻便性可以从方向盘操纵力和方向盘把持力两个不同的角度来考虑,本文从方向盘操纵力角度研究转向系统的轻便性。本文选取汽车横摆速度ωr评价转向的灵活性。
2.2.1 转向系统动力学方程
为分析问题方便,把前轮和转向机构向轴简化。从电动机到转向轴的传动比为N1,而从转向轴到前轮的传动比为N2,故有:
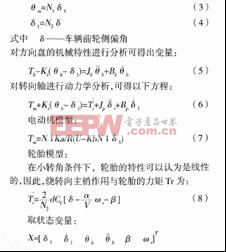
输人变量:U=[Th u]
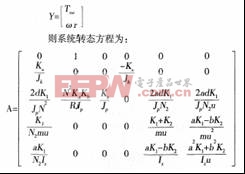
系统的状态方程:X=AX+BU(9)
系统的输出方程:Y=CX+DU(10)
由于EPS的控制目标是改善汽车操纵的轻便和转向的灵活性,所以选取汽车横摆速度ωr和传感器测量Tsw,其中(Tsw= Ks(θh- δ1,)作为输出:

3模糊控制原理
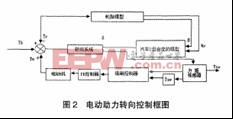
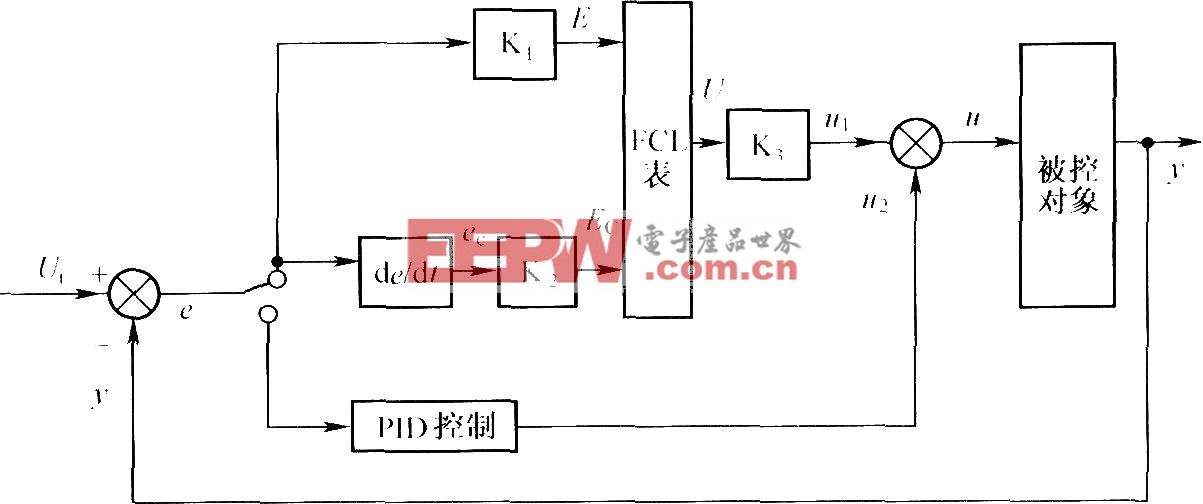
针对EPS设计了一种模糊自调整控制方案,具体方案如图2所示。它由一个模糊自调整机构和一个PD控制器组成,模糊自调整机构根据输入信号(即传感器测得扭矩的大小、方向以及变化的趋势等特征)决定使用两个模糊表中的哪个,根据这一模糊表进行模糊推理作出相应决策,在线整定PD参数Kp,Kd,在线调整PD参数Kp、Kd,以期获得满意的控制效果。
在常规的模糊控制控制器中,量化因子![]() 和比例因子Ku是固定的。考虑在实际电动助力转向系统中,当参数发生变化或受到随机干扰影响时,常规模糊控制器将无法适应控制环境的变化,为保证有较好的转向灵敏性和操纵稳定性,采用参数自整定模糊控制器,即在常规模糊控制器的基础上选择适当的调整算法在线整定
和比例因子Ku是固定的。考虑在实际电动助力转向系统中,当参数发生变化或受到随机干扰影响时,常规模糊控制器将无法适应控制环境的变化,为保证有较好的转向灵敏性和操纵稳定性,采用参数自整定模糊控制器,即在常规模糊控制器的基础上选择适当的调整算法在线整定![]() ,以使系统性能达到预定要求。
,以使系统性能达到预定要求。
模糊PD控制器可根据切向力矩Tsw和其变化率![]() 决定电机输人端的电压大小,其关系式对于模糊控制器来说,定义A为方向盘切向力矩Tsw规范化后的变量,B为切向力矩变化率
决定电机输人端的电压大小,其关系式对于模糊控制器来说,定义A为方向盘切向力矩Tsw规范化后的变量,B为切向力矩变化率![]() 规范化后的变量,模糊集为{NB,NM,NS,Z0,PS,PM,PB};Tsw的论域为{-30,30};
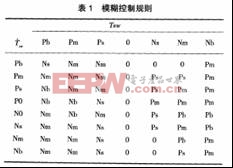
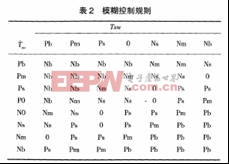
规范化后的变量,模糊集为{NB,NM,NS,Z0,PS,PM,PB};Tsw的论域为{-30,30};![]() 的论域为{-20,20};膜糊推理结果u的论域为{-5,5}.其隶属函数为三角形隶属函数本文设计了两个模糊控制表1针对提高转向系统轻便性,表2针对提高转向系统的路感。
的论域为{-20,20};膜糊推理结果u的论域为{-5,5}.其隶属函数为三角形隶属函数本文设计了两个模糊控制表1针对提高转向系统轻便性,表2针对提高转向系统的路感。
此外,在该控制系统中,采用一个修正因子函数a(t)来自动调整PD控制器参数Kp、Kd,用以改善系统性能。实际计算时,根据当前的变量值A和B,结合实际受控过程产生另一个模糊变量H(它是反映a (t)在动态过程中应具有的变化趋势的模糊决策),然后H经非模糊化处理得h(t)1其在线调整按式(11)进行:

综上所述,模糊自调整机构可根据输人信号,即传感器测得扭矩Tsw和其变化率Tsw的大小、方向及变化趋势等特征,经规范化和模糊化后,由模糊规则表进行模糊推理,做出相应决策,在线整定PD参数Kp、Kd,以期获得满意的控制效果。
4 仿真及结果分析
4.1 仿真模型
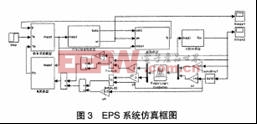
系统仿真框图如图3所示:
电动助力主要参数:
4.2 仿真结果分析:
对EPS系统,假设汽车在水平路面上匀速行驶,车速u=1 Okm/,转向盘上作用4N.m的阶跃转矩的响应曲线。根据上述仿真模型在Simulink环境下进行了仿真,其仿真结果如图4、图5、图6所示。
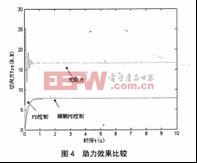
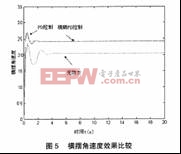
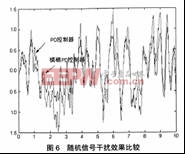
图4中所示为汽车切向力的对比,采用EPS系统后,系统的切向力下降,说明轻便性很好。采用模糊PD控制过渡时间和超调量明显减小。图5所示为汽车横摆角速度的对比,采用模糊自调整控制后,汽车横摆角速度有所增加且达到稳定时间缩短,提高了汽车操作稳定性和灵敏度。图6所示随机信号干扰效果比较。其结果表明,模糊自调整PD控制比单独的PD控制有更好的抗干扰能力。
5 结论
显然,PD控制助力系统的输出响应要比无助力系统平稳模糊自调整PD控制助力系统的输出响应最为平稳,抗干扰能力较强。其仿真结果表明,这种模糊自调整PD控制器具有较好的控制效果和鲁棒性,抗干扰能力显著提高。通过对控制器中系数Kp和Kd的在线调整,这种模糊自调整PD控制器,较好地解决了转向系统中的轻便与灵敏的矛盾,协调了汽车操纵轻便性和驾驶员能获得充分路感的关系。
三维扫描仪相关文章:三维扫描仪原理

评论