基于发动机性能虚拟仪器测试系统设计

4 软件结构及算法
(1)软件结构
发动机性能虚拟仪器测试系统总体采用一种基于TCP/IP协议的客户机/服务器(CS)结构。服务器架构为NI cFP分布式I/O体系,利用其内嵌的独立式实时系统实现目标参量的信号采样,并完成对目标参量的实时监测和控制;客户机则采用通用的PC机结构,运行Windows 多线程操作系统,使用LabVIEW虚拟仪器平台,借助TCP/IP协议实现,与服务器之间控制参量及检测数据的通信,并提供GUI图形化用户界面,实现人机交互,完成控制参数的输入,以及检测数据的分析、运算和图表显示。
系统操作流程为,上电后服务器自动启动存储器中内建的LabVIEW RT实时程序,并实时侦听客户机“开始测试”的命令;客户机开机运行发动机性能虚拟仪器测试主程序,完成用户登录、硬件配置、选择测试项目、设置测试参数后,启动测试程序;服务器侦听到客户端“开始测试”命令后,按照客户制定的硬件配置、测试项目以及测试参数开始实时控制与数据采集,并通过TCP/IP协议将实验数据发送给客户机;客户机发出PID控制命令,并对服务器发送的实验数据进行分析处理,完成PID控制后,按照测试项目进行测试,分析处理测试数据,并以图表方式显示实验结果;完成测试后,客户机发出结束测试的命令,经服务器接收确认后,结束测试。
(2)PID控制算法
本系统试验了3种PID控制算法:位置式PID控制算法、增量式PID控制算法和积分分离PID控制算法。
1) 位置式PID控制算法

该算法的优点是原理简单,只是将经典的PID算法理论离散化,运用于计算机辅助测量,结构简单易于实现;缺点是每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大;而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化会引起执行机构位置的大幅度变化。
2) 增量式PID控制算法

该算法的优点是,由于计算机输出增量,误动作时影响小,必要时可以用逻辑判断的方法去掉;手动/自动切换时冲击小,便于实现无扰动切换,此外当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故仍能保持原值;算式中不需要累加。控制增量Δu(k)的确定,仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。增量式控制也有不足之处:积分截断效应大,有静态误差;溢出的影响大。
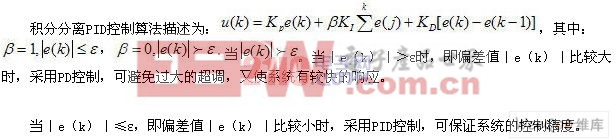
3)积分分离PID控制算法
5 结 论
该发动机性能虚拟仪器测试系统,实现了对发动机的多路压力、扭矩、转速、功率以及温度实时监测,并利用TCP/IP协议实现主控机对多路信号的远程操控以及测试数据的网络共享;该系统具有测量精度高、运行稳定性强,适用于多种类型发动机综合性能测试。





评论