基于MEMS组合模块的姿态检测系统设计

摘要:在研究两轮自平衡电动车的平衡控制的基础上,设计了基于MEMS组合模块的姿态测量系统。通过对各MEMS传感器输出信号特征的提取、分析,将离散化低通滤波器模型与互补滤波的思想相结合,巧妙地构造出一种便于本系统实现的数据融合模型。同时,提供了一种基于MEMS组合模块姿态检测的低成本、可行性方案。
关键词:MEMS组合模块;姿态检测;数据融合;MMA7260;ADXRS610
引言
在两轮自平衡电动车的平衡控制中,对车体的俯仰角进行实时准确的测量是整个平衡控制的前提。传统的机械式姿态测量仪体积大、响应速度慢、测量精度低,远远不能满足双轮自平衡电动车平衡控制的实时性和精确性要求。基于光学原理和图像处理技术的姿态测量仪精度较高,但是价格昂贵,且需要进行大量的复杂运算,一般需要计算机辅助完成,不符合两轮自平衡电动车的成本和车载性要求。本文采用ME-MS组合模块的设计方案实现了对车体俯仰角的测量。本测量系统不但具有体积小、响应快、成本低的特点外,而且经过数据融合处理后,有效地减小了环境中震动干扰的影响,能够在具有强烈震动的车体环境中达到系统的精度要求。
1 系统构成及工作原理
1.1 系统构成
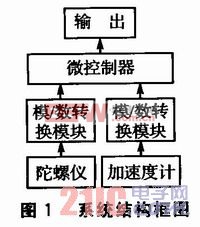
本姿态测量系统主要由单片机PIC16F877、加速度计MMA7260和陀螺仪ADXRS610构成。系统结构框图如图1所示。Microchip公司提供的PIC16F877芯片作为控制芯片,负责对加速度计与陀螺仪进行A/D采样及后续的数据处理。
ADXRS610是ADI公司推出的一款高性价比的单轴陀螺仪。ADXRS610是一款模拟量输出器件,其输出量与绕旋转轴的旋转角速度成线性正比,对角速度量进行积分运算即可得到旋转的角度值。ADXRS610角速度的测量范围是±300 rad/s,灵敏度为6 mV/(rad·s-1),零位输出电压为2.50 V,非线性误差为±0.1%F.S.,-3 dB带宽为40 Hz,固有频率为14 kHz。
1.2 加速度计的数学应用原理
MMA7260是一款性价比较高的三轴模拟量输出加速度计,模拟输出量与其敏感轴方向上所受加速度大小成线性关系。文中利用MMA7260测得静态加速度值,进而计算出被测平台与水平面的夹角值。所谓测量静态加速度,是指在平台静止时,测量重力加速度在某一敏感轴上的分量的大小。由于重力加速度的方向总是垂直向下的,这正好为测量系统提供了一个天然的参考坐标系。通过加速度计间接测量角度的数学原理有两种方式。
方式一如图2所示。利用单一敏感轴测得重力加速度分量,其中角度θ、重力加速度g与敏感轴分量gx三者构成反余弦关系:
![]()
方式二如图3所示。
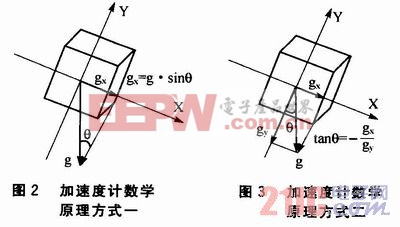
利用双敏感轴测得重力加速度分量,其中角度θ、Y敏感轴分量gy与X敏感轴分量gx三者构成反正切关系:
![]()
方式一只需要单轴加速度计就能实现角度测量,在数据采集时也只需要单通道的ADC模块进行处理,在硬件成本和软件编程的难易度方面都有优势。方式二采用两敏感轴同时采集两个方向的重力加速度分量,通过两个轴的分量比来获取角度值。由于两敏感轴所处的环境因素一样,因此对于震动、温度变化等因素的干扰有一定的抑制效果。另外,对于不同地理位置的重力加速度常量值的变化,方式一会产生相应的误差,而方式二可以从原理上消除此类误差。经比较,选用第二种方式。










评论