自适应动态寻优控制系统仿真研究

摘 要:对采用自适应动态寻优方法的极值调节控制系统进行仿真研究,其目的是为解决在工业生产过程中若采用传统的动态寻优方法就必须准确地辨识极值调节控制对象线性部分的参数这一无法回避的难题。对参数飘移的极值调节控制系统进行仿真研究,仿真结果表明,采用自适应动态寻优方法对极值调节控制对象线性部分模型的先验知识要求很少,只需要知道极值调节控制对象的线性部分的阶数就足够了,在动态寻优的过程中不仅能够自动辨识控制对象的参数,而且还能够自动适应参数的飘移。从而可得出如下结论:在实际工业生过程中,若采用自适应动态寻优方法,根本不需要辨识极值调节控制对象线性部分的参数,而且还能够自动适应参数的飘移。从而能有效地保证控制系统运行的连续性与稳定性。因此采用自适应动态寻优方法的极值调节控制系统将会在实际工业生产过程中发挥其强大的控制功能。
关键词:系统仿真;自适应动态寻优;飘移;实用
对于极值调节控制对象,文献提出一种自适应动态寻优方法,它成功地解决了使用传统的动态寻优方法在实际工业生产过程中无法回避的一个难题,即保证极值调节控制系统运行的连续性和稳定性问题。因为若用传统的动态寻优方法,当极值调节控制对象的参数飘移后控制系统就不能正确地进行动态寻优,就必须把控制系统停下来重新辨识极值调节控制对象的参数,再重新整定控制系统的参数。而自适应动态寻优方法最突出的优点就是在动态寻优的过程中不仅能够自动辨识控制对象的参数,而且还能够自动适应参数的飘移,因此有效地保证了控制系统运行的连续性与稳定性。而且这种自适应动态寻优方法对极值调节控制对象的先验知识要求非常少,只要知道控制对象的阶数就能始终正确地进行动态寻优。其主要思想如下所述。
1 自适应动态寻优方法简要回顾
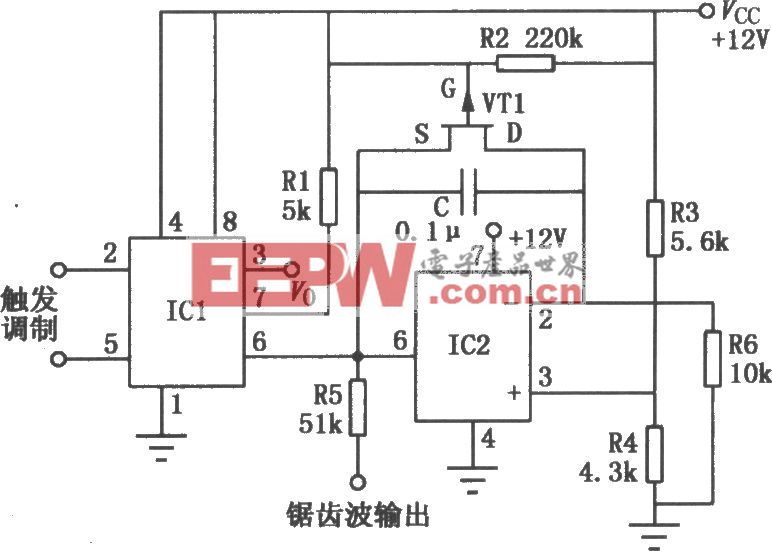
寻优系统采用步进式调节器,步进周期T0是固定的。极值调节对象可以分解为非线性环节与线性环节的串联,如图1所示。
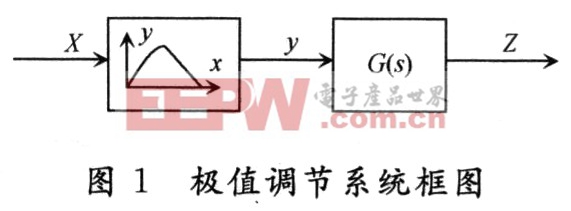
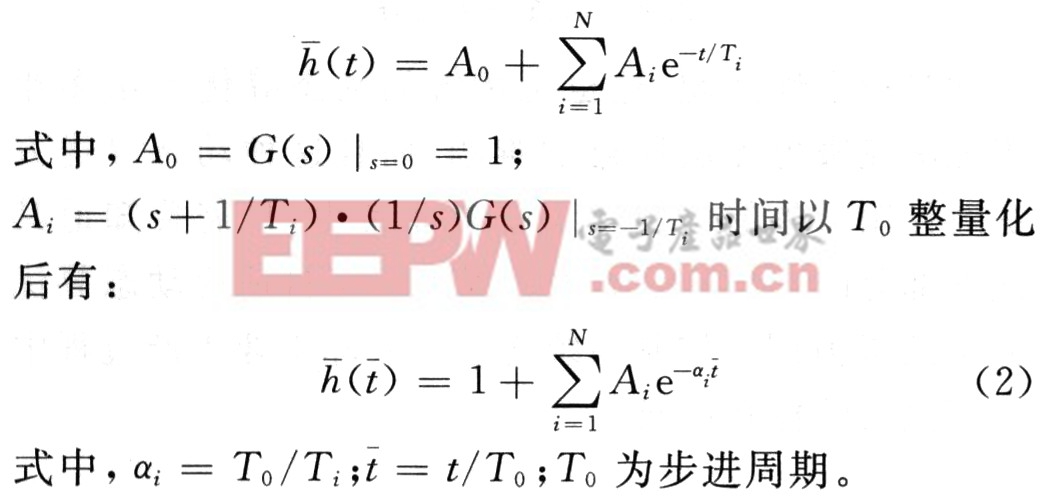
设极值调节对象线性部分的传递函数为:

单位阶跃响应为:









评论