自适应动态寻优控制系统仿真研究
设系统的输出如图2所示,把每个步进周期分成相等的2N等份,在每个分划点进行采样并取2N+1个采样值,预估比较点在试探步后的第一个采样点上进行。本文引用地址:http://www.eepw.com.cn/article/192079.htm

图2中:如果在t=n―l不加试探阶跃信号时,△Z2N+1系统输出的预估差值;在t=n一1加试探阶跃信号时,△Z2N+1系统输出的实际差值;在比较点上△Z2N+1是系统输出的实际差值与预估差值的比较差值即:

根据式(3)可知极值调节控制对象的输出采样值△Z1,△Z2,…,△Z2N+1来判断步进增量方向,步进方向的逻辑判别式为:
![]()
式中,sgn[△xn]指的是△x的符号。由式(4),(5)可以看出,步进方向的逻辑判别式与控制对象的惯性时间常数Tl,T2,…,TN无关。因此这些参数随时间的缓慢变化并不能影响步进方向的逻辑判别式,换言之,式(4)与式(5)能自己适应对象参数的变化,因而称作自适应为动态寻优算法。以这种算法为核心设计的极值调节控制系统,不仅能自动识别参数,还能自动适应这些参数的变化。因此只要知道极值调节控制对象线性部分的阶数就能正确地进行动态寻优,在寻优的过程中,无论控制对象线性部分的参数变化与否都不会对寻优结果的正确性有任何影响。仿真研究的结果充分证明了这一点。
2 仿真研究
对于非线性极值特性,有:
![]()
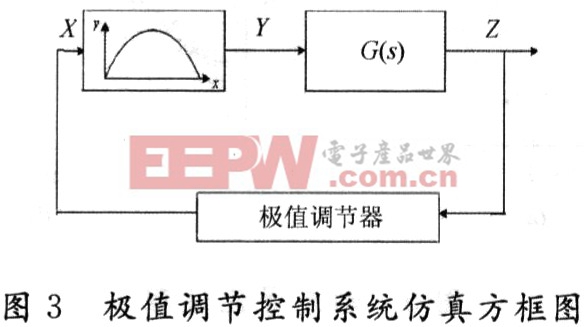
极值特性未飘移时,最初的极值点为(5,10),极值调节器由式(4)和式(5)实现。仿真程序框图如图4所示。











评论