AVR单片机视觉智能寻迹车设计与实现

0 引 言
智能运输系统是未来交通运输系统发展的趋势,智能汽车在智能运输系统中扮演着十分重要的角色。作者提出智能寻迹车作为构建未来智能交通运输系统中重要部分,针对未来交通运输系统有导航线的环境命题假设下智能汽车的自主寻迹问题,提出一种基于视觉的智能寻迹车模设计方案,作为该假设问题的解决方案。
基于视觉的智能寻迹车模设计方案能够在线型复杂,转弯半径不确定性大的情况下,利用视觉自主寻迹前进,分级精确转向。
1 系统总体设计
基于视觉的智能寻迹车模系统以AVR单片机MEGAl6为核心,由单片机模块、路径识别模块、直流电机驱动模块、舵机驱动模块等组成,如图1所示。
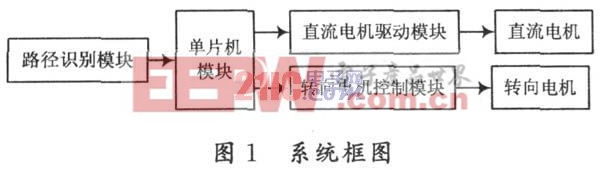
直流电动机为车辆的驱动装置,转向电动机用于控制车辆行驶方向。智能寻迹车模利用视觉在跑道上自主寻迹前进,分级精确转向。道路为318 mm宽白色底板,其中间粘贴18 mm宽且线型不断变化的黑胶带。
2 硬件设计
2.1 控制模块
寻迹车模采用AVR内核的ATMEGAl6。该芯片能够不需要外围晶振和复位电路而独立工作,非常适合智能寻迹车模的要求。控制器模块安装在广东奥迪玩具实业有限公司生产的雷速登1:24比赛级遥控车模上。
2.2 路径识别模块
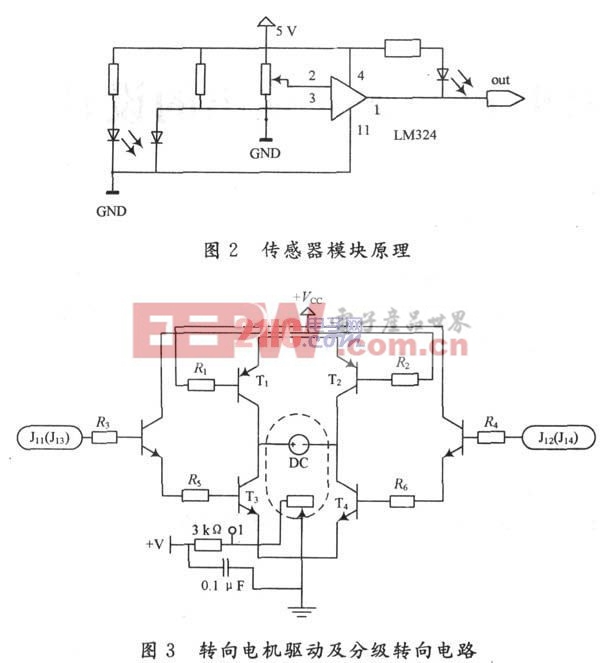
采用反射式光电传感器来区分跑道上的黑色与白色,反射式光电传感器有光线发射端和光线接收端,白底与黑线对发射端发出光线的反射度不同,从而影响接收端产生的电压。用反射式光电传感器、可调电阻和运算放大器LM324组成传感器模块,如图2 所示。实现在不同赛道上输出高低电平,自主寻迹。
2.3 转向电机和驱动电机驱动模块
采用H桥电路来驱动智能寻迹车的前轮转向电机和后轮驱动电机,实现智能寻迹车左右转向、前进、后退、加速、减速等功能。转向电机驱动电路如图3所示。其中前轮转向电机控制方案为分级转向控制,后轮驱动电机控制方案亦为开环控制。
2.4 分级转向模块
为了实现在不同的转弯半径处实现不同角度的精确转向,设计了分级转向电路,如图3所示。车模舵机中可变电阻阻值为1.8~4.2 kΩ,1接单片机A/D管脚。电压V为片内稳定基准电压,且可以看出:

以1号传感器为例,说明分级转向角度计算。













评论