基于MSP430的自控式骨矫形器的设计与实现

自1904年Codivilla报告骨延长术开始,肢体延长术已经发展了100多年,骨缓慢牵张再生理论已经形成且不断完善,与此同时肢体延长器械也在不断发展。目前肢体延长的手术技术和器械经历了三个发展阶段[1]: (1)骨外固定支架技术;(2)髓内钉结合外固定支架;(3)完全植入式肢体延长器。骨外固定支架技术采用人工外力控制实现骨矫形器的拉伸,拉伸的控制精度低,操作难度大,临床应用中容易引发针道感染,不利于延长区骨质愈合,同时长时间携带外固定器也会在患者的生理和心理上造成不良影响。髓内钉结合外固定支架技术在稳定性、延长精度上有了长足的发展,但仍无法避免外固定支架带来的不良后果。完全植入式骨延长器,因其内置动力发生装置可精确控制延长速率同时又可避免针道感染问题等优势,成为骨延长器的发展方向。目前此技术最成熟和最具代表性的是ORTHOFIX公司研制开发的髓腔内置式骨骼动力延长器(ISKD), 它由外置的监测器和手术植入的类似伸缩望远镜桶式的髓内钉组成,其基本原理是靠患者的关节活动旋转带动内部牵张器牵张。但其缺点是只能牵张,不能回缩加压固定,一旦活动度大,超过单次牵张长度,不能回缩,有可能导致断骨面不能生长,存在极大的临床应用风险。
目前,我国肢体延长的手术技术及器械还停留在第二阶段[2],远远落后于发达国家。我国的国家中长期科技发展纲要中,已经把新型医疗器械的研发作为鼓励投资和自主创新的新领域。为此,本文设计了一种以MSP430F169单片机为核心的高精度、自控式骨矫形器。该骨矫形器不但克服了外固定器的缺点,也克服了ISKD不能回缩加压固定的缺点。采用电机控制,操作简单方便,用户可以根据需要自控骨矫形器的伸缩,延长精度高,具有广阔的应用前景。
1 系统总体设计
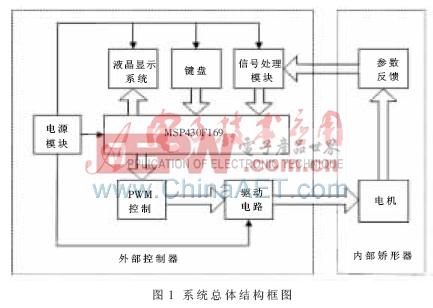
系统由植入长骨骨髓腔的内部骨矫形器和体外的控制器两部分组成。体外的控制器通过生物硅胶管引线与内部骨矫形器相连,主要由MSP430F169单片机、电机驱动电路、电源模块、信号处理模块、键盘及液晶显示系统等相关单元组成。体内骨矫形器通过精密电机的运行实现自身伸缩,单片机通过由磁敏传感器构成的参数反馈模块及信号处理模块实现对骨矫形器的精确控制。系统总体结构框图如图1所示。
为满足用户对便携性的要求,矫形器系统采用电池供电。因此低功耗是系统的一个主要指标,为此系统选用具有超低功耗特点的MSP430系列单片机。在MSP430F169单片机的基础上搭建系统平台,同时配合软件中断处理机制,非常好地实现了系统的低功耗指标。高精度控制是系统的另一个主要指标,骨矫形器必须保持高精度牵张、回缩控制,任何误差都会给用户带来不良影响。系统使用ZP系列传感器传回微电机运行信号,信号经过放大处理后送回单片机处理,实现精确控制。根据软件设计,系统实现运行精度为0.1 mm,其精度远高于现有矫形器。
2 系统硬件设计
2.1 MSP430F169单片机
MSP430F169[3]单片机是美国德州仪器公司生产的具有超低功耗、功能强大的16位单片机。它采用“冯·诺依曼”结构, RAM、ROM及全部外围模块都位于同一个地址空间内, 最大寻址地址为62 KB;具有强大的中断功能, 48个I/O 引脚, 每个I/O口分别对应输入、输出、功能选择、中断等多个寄存器, 在对同一个I/O口进行操作前,选择其要实现的功能便可实现功能口和通用I/O口的复用, 大大地增强了端口的功能和灵活性;MSP430F系列超单片机自带闪速存储器,运行在1 MHz时钟条件下时,工作电流视工作模式不同仅为0.1~280 μA;同时它具有良好的仿真开发技术,设置有JTAG仿真接口和高级语言编译器。















评论