基于MSP430的自控式骨矫形器的设计与实现
3 系统软件设计
3.1主程序
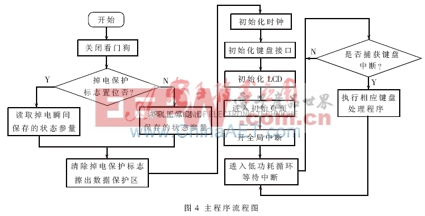
为了减轻CPU的负担和降低电路功耗, 系统全部功能都使用中断方式实现。主程序进行一些必要的初始化工作后进入低功耗死循环状态并等待中断。一旦有中断, CPU从低功耗模式中唤醒,进行中断处理, 中断结束后再次返回低功耗死循环。主程序的流程图如图4所示。本文引用地址:http://www.eepw.com.cn/article/166532.htm
3.2 电机控制
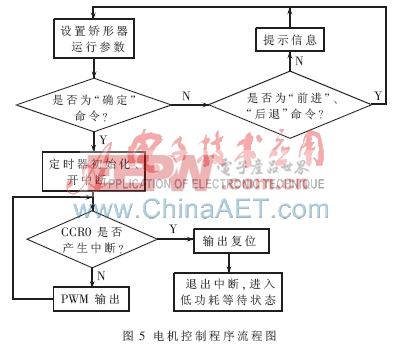
矫形器的调速功能通过MSP430F169的定时器B输出PWM方波来实现[5]。通过改变捕获/比较寄存器CCR1、CCR2中的数值就可以改变定时器B产生的2路(P4.1、P4.2)PWM方波信号的占空比, 通过改变捕获/比较寄存器CCR0中的数值就可改变PWM方波信号的周期,由此达到改变微电机转速的目的。当P4.1输出PWM信号时,矫形器正向运行;当P4.2输出PWM信号时,矫形器反向运行;当P4.1与P4.2都输出或者都不输出信号时,矫形器停止运行。
矫形器运行位移通过定时器A所记录的脉冲数来确定。微电机的转速为8 000 r/m,经过减速器4 096:1的减速,输出速度为1.95 r/m,因此中心螺杆的转速也为1.95 r/m,而中心螺杆的螺纹导程为0.5 mm。所以内套筒相对外套筒的运行速度为0.975 mm/min,整个矫形器的运行速度即为0.975 mm/min。通过运算可知矫形器每运行0.1 mm,微电机就运行819.2转,而码盘上固定了4个小磁铁,计数器就记录了3 277个脉冲。用户通过键盘选择当次运行位移,程序中通过设置CCR0值来实现对矫形器运行位移的精确控制。电机控制程序流程图如图5所示。
本文介绍了一种新型高精度自控式骨矫形器设计及实现。该骨矫形器安放在长骨骨髓腔内,以避免外固定器械的高并发症,既可作内固定器,又具有牵张作用,能够在单次牵张后,达到长时间持续稳定的牵张效果;肢体牵张手术创伤小,手术操作及术后护理简单;性能安全可靠、操控简单稳定实用而又不困扰患者日常生活,在实际应用中效果明显优于传统的骨矫形器,具有非常高的实用价值。
参考文献
[1] 张涛,庞贵根.肢体延长的研究进展[J].中国骨与关节损伤杂志,2008,23(3):262-264.
[2] 赵辉三. 肢残康复20年:假肢矫形器服务的发展与挑战[J].中国矫形外科杂志,2007,15(7):481-483.
[3] 魏小龙.MSP430系列单片机接口技术及系统设计实例[M].北京:北京航空航天大学出版社,2002.
[4] 庄伟,宋光明,魏志刚,等.具有机动能力的无线传感器网络节点的设计与实现[J].吉林大学学报(工学版),
2007,37(4):939-943.


















评论